




manutention (suite)
Cadre
Ses facteurs quantitatifs sont ses dimensions et ses déclivités éventuelles ; ses facteurs qualitatifs sont sa position vis-à-vis des agents atmosphériques (en plein air, ou « in-door », extérieur, ou « out-door », et mixte) et surtout sa finalité. Il existe des cadres polyvalents, capables de convenir à des manutentions totalement différentes, et des cadres spécifiques, adaptés uniquement à une manutention bien déterminée, le degré de finalité pouvant varier entre ces deux positions extrêmes.
Modalités de fonctionnement
Elles sont soit fonctionnelles, soit locatives. Les premières impliquent une notion de cadence (cas des chaînes de fabrication) et sont dues à des considérations techniques (manutention de métaux en fusion) ou économiques (désir d’abaisser les prix de revient). Les secondes concernent soit des appareils fonctionnant à poste fixe et exceptionnellement (moyens de levage disposés au-dessus d’alternateurs, de transformateurs, etc.), soit des opérations sans urgence particulière, comme l’enlèvement de pièces terminées de fabrication. D’autre part, le débit joue un rôle déterminant, surtout du point de vue économique. Une décision de base consiste, en effet, à choisir entre manutentionner rapidement de faibles charges ou manutentionner lentement des charges importantes (groupage d’objets ou de produits avec stockage intermédiaire). L’expérience montre que la seconde option est souvent plus économique.
Mouvements
Quel que soit l’appareil utilisé, ses mouvements se rangent dans l’une des catégories ci-après :
— mouvement rectiligne horizontal ou vertical ;
— mouvements combinés dans un plan horizontal ou vertical ;
— mouvements dans un espace tridimensionnel ;
— rotation autour d’un point.
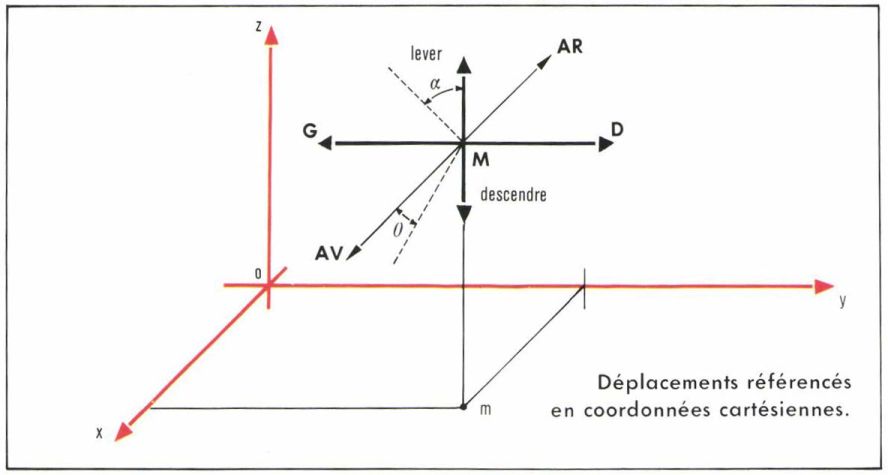
Tous ces mouvements peuvent se définir à partir des systèmes de coordonnées classiques. En coordonnées cartésiennes, le mouvement marche AV marche AR correspond, par définition, à une direction parallèle à l’axe Ox ; les mouvements vers la droite et vers la gauche s’effectuent suivant l’axe Oy, tandis que la direction Oz traduit les mouvements de levée et de descente, c’est-à-dire le levage. D’autre part, la rotation autour d’un point M suppose définis les deux angles α et θ, les rotations élémentaires étant exécutées suivant le plan horizontal et un plan vertical passant par ce point M.
Appareils
Un appareil de manutention ne peut avoir au plus que cinq possibilités de déplacement, dont, toutefois, certaines, voire toutes, peuvent ne pas être indépendantes. Elles sont alors liées dimensionnellement, par exemple (en coordonnées cartésiennes)
ou temporellement
Plus un appareil possède de possibilités de déplacement indépendantes, plus il se trouve être polyvalent ; mais ses mouvements peuvent, par l’intervention d’un mécanisme, cesser d’être indépendants et devenir simultanés ou consécutifs. En fonction des données et des déplacements possibles, on peut classer les appareils de manutention :
— suivant leur degré de polyvalence (de 1 à 5) ;
— en fonction du produit véhiculé (charge isolée, vrac ou fluide).
Cette première discrimination peut être poussée à partir de l’analyse des facteurs complémentaires : saisie de l’objet ou du produit, continuité ou discontinuité des mouvements, degré d’automaticité du fonctionnement.
Appareils pour charges isolées
Les appareils de base sont monovalents, c’est-à-dire qu’ils ne peuvent se déplacer que suivant une seule direction de référence, par exemple l’axe Oz. Les appareils polyvalents ne sont que des combinaisons d’appareils monovalents. Parmi les appareils capables de desservir un espace tridimensionnel sont considérés comme des appareils types :
— les ponts roulants ;
— les gerbeurs à fourches ;
— les convoyeurs.
• Ponts roulants. Dans leur présentation la plus générale, ils se composent essentiellement d’une poutre qui s’appuie sur deux sommiers munis de roues motorisées ou non (mouvement AV-AR), d’un appareil de levage capable de se déplacer le long de la poutre précitée (mouvement DR-G) et de deux chemins de roulement sur lesquels prennent appui (pont posé) ou sont suspendus (pont suspendu) les sommiers.
Il existe de très nombreux modèles de ponts roulants, la différenciation première se faisant à partir de la portée (distance entre chemins de roulement), de la force de levage, de la nature du mouvement. Celui-ci peut être libre, le pont se déplaçant soit par simple poussée sur la charge (solution valable pour une charge utile inférieure à 1 000 kg et une portée inférieure à 7 m), soit à l’aide d’une chaîne pendante sans fin commandée du sol, ou encore par l’intermédiaire d’un dispositif électrique agissant sur un groupe motoréducteur dont un pignon attaque la couronne mobile des galets moteurs (vitesse courante de 6 à 45 m/mn).
• Gerbeurs. Leur cinématique vise à saisir une charge isolée à sa partie inférieure au moyen de deux fourches animées d’un mouvement de montée et de descente. La prise de la charge nécessite la présence d’orifices adéquats pour le passage des fourches (charge palettisable) ou la mise sur palette. Certains modèles, généralement désignés sous le terme de chariots élévateurs, comportent un mouvement angulaire vers l’arrière des fourches de façon à parfaire le calage de la charge. Les multiples modèles de gerbeurs, y compris les chariots élévateurs à fourches, qui représentent un type particulier, se différencient suivant :
— les possibilités d’évolution (dimension et rayon de braquage) et de performances, notamment le levage de la charge à une hauteur donnée ;
— le mode de propulsion (chariots électriques, Diesel, etc.) ;
— la disposition des fourches ;
— la position du conducteur, appelé cariste (accompagnant, porté, assis).
• Convoyeurs. Ils se composent essentiellement d’une voie et d’un élément porte-charge appelé trolley, qui roule sur ladite voie. Les différents trolleys sont régulièrement espacés et se trouvent réunis à une chaîne motrice sans fin commandée par un groupe motoréducteur.
On distingue les convoyeurs au sol, souvent dénommés tow-veyors, et les convoyeurs aériens, lesquels se subdivisent en convoyeurs simple voie et en convoyeurs double voie, la particularité de ces derniers étant la déconnection possible de l’élément porteur du trolley entraîneur, ce qui offre de très intéressantes possibilités de stockage.