C. Chassé, le Mouvement symboliste dans l’art du xixe siècle (Floury, 1947). / P. Jullian, Esthètes et magiciens (Perrin, 1969) ; les Symbolistes (Ides et Calendes, Neuchâtel, 1973). / F.-C. Legrand, le Symbolisme en Belgique (Laconti, Bruxelles, 1972). / J. Pierre, le Symbolisme (Hazan, 1976). Catalogues d’exposition. Il Sacra e il profana nell’arte dei Simbolisti, Galleria civica d’Arte moderna (Turin, 1969). / Le Symbolisme en Europe (Rotterdam-Paris, 1975-76).
symétrie
Transformation ponctuelle euclidienne qui conserve les distances, ou isométrie.
Une telle isométrie peut être un déplacement : c’est le cas, dans le plan, de la symétrie par rapport à un point, qui est une rotation d’angle π autour de ce point, et, dans l’espace, de la symétrie par rapport à une droite, ou retournement, qui est une rotation involutive autour d’un axe porté par la droite. Ce peut être aussi un antidéplacement, transformant une figure en une figure inversement égale : c’est le cas, dans le plan, de la symétrie par rapport à une droite ou, dans l’espace, des symétries par rapport à un plan ou à un point.
Symétries dans le plan
Symétrie par rapport à une droite
Dans un plan (fig. 1) rapporté à un repère orthonormé le vecteur étant porté par la droite (D), la symétrie par rapport à la droite (D) associe à un point M(x, y) quelconque du plan le point unique M′ (x, – y). La symétrie SD par rapport à la droite (D) est donc la transformation ponctuelle définie par (x′ = + x, y′ = – y). C’est une transformation bijective et involutive, c’est-à-dire telle que SD ∘ SD = I, identité du plan, ∘ désignant la composition des transformations ou applications du plan dans lui-même. En effet, si x′ = x et y′ = – y, on a x =x′ et y = – y′ : la transformation inverse, qui est définie, est identique à la transformation initiale SD. Sous une autre forme, la droite (D) étant la médiatrice du segment MM′, si le point M′ est le transformé du point M par SD, le point M est le transformé du point M′ par SD.
Si, d’autre part, il existe deux points M1(x1, y1) et M2(x2, y2), dont les symétriques par rapport à la droite (D) sont et on a, d’après le théorème de Pythagore, d désignant la distance. Ainsi, la symétrie par rapport à une droite est une isométrie, puisqu’elle conserve les distances. Enfin, un angle orienté est transformé en un angle opposé [fig. 2] : la symétrie par rapport à une droite, dans le plan, est un antidéplacement.
• Produits de deux symétries par rapport à deux droites Les deux droites sont concourantes (fig. 3). Les symétries SD, puis SD′ transforment respectivement le point M en un point M1 et le point M1 en un point M′. Donc SD′ ∘ SD transforme le point M en M′. Si l’on oriente (D) et (D′) arbitrairement de façon à obtenir deux axes et dont l’angle est modulo 2 π, on passe du point M au point M′ par la rotation de centre O et d’angle 2 π, puisque l’angle est double de l’angle et est donc indépendant du point M choisi, et que, d’autre part, OM = OM1 = OM′.
Le produit de deux symétries d’axes concourants est donc un déplacement que l’on peut d’ailleurs décomposer d’une infinité de manières en un produit de deux symétries dont les axes passent par le centre de la rotation et qui font entre eux un angle égal à la moitié de l’angle de la rotation : on effectue la symétrie par rapport à X, puis par rapport à X′.
• Les deux droites sont parallèles (fig. 4). Le transformé du point M par le produit SD′ ∘ SD est le point M′. On passe du point M au point M′ par la translation de vecteur étant le vecteur de la translation qui transforme la droite (D) en la droite (D′). Le produit SD′ ∘ SD est donc un déplacement qui, inversement, peut être décomposé d’une infinité de manières en un produit de deux symétries d’axes parallèles : étant la translation qui transforme la droite (D) en la droite (D′).
Symétrie par rapport à un point
On peut l’obtenir comme produit de deux symétries par rapport à deux droites concourantes et perpendiculaires. Cette transformation est identique à la rotation de centre O et d’angle π (fig. 5). On voit sur la figure 5 que, des trois symétries, SO, SD, SD′, l’une est le produit commutatif des deux autres : SO = SD′ ∘ SD = SD ∘ SD′ ; SD = SO ∘ SD′ ; SD′ = SO ∘ SD. Si une figure plane admet, parmi les trois éléments de symétrie constitués par deux axes perpendiculaires et leur point de rencontre, deux de ces éléments, elle admet le troisième.
Symétries dans l’espace
Symétrie par rapport à un plan
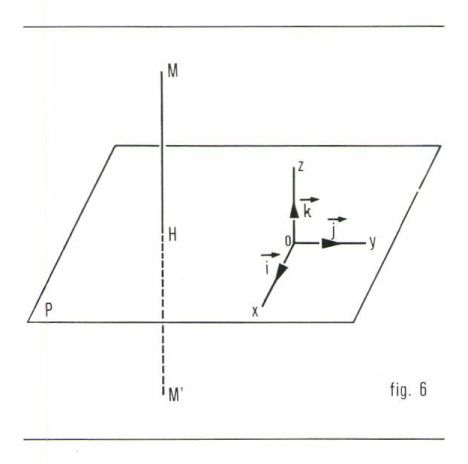
Dans l’espace (fig. 6) rapporté au repère orthonormé appartenant au plan (P) qui définit la symétrie, la symétrie par rapport au plan (P) transforme le point M(x, y, z) en un point M′(x′, y′, z′) avec x′ = x, y′ = y, z′ = – z. Le plan (P) est le plan médiateur du segment MM′. Si les points M1(x1, y1, z1) et M2(x2, y2, z2) sont respectivement transformés en des points et on a :
La transformation conserve donc les distances : c’est une isométrie. De plus, elle est bijective et involutive ; cela résulte de la traduction analytique de la symétrie.
• Transformées de figures données La figure transformée d’un segment AB est un segment égal A′B′ ; celle d’une droite est une droite et celle d’une demi-droite, une demi-droite. Un angle droit est transformé en un angle droit et un triangle ABC en un triangle égal A′B′C′. Deux plans ou deux droites parallèles sont transformés en deux plans ou deux droites parallèles. Un cercle ou une sphère sont transformés en un cercle ou une sphère, les rayons étant conservés.
Mais un trièdre est transformé en un trièdre dont l’orientation n’est plus celle du trièdre : les deux trièdres ne sont pas égaux (on ne peut les faire coïncider). De façon générale, une figure est transformée en une figure inversement égale : seules les distances sont conservées. La symétrie par rapport à un plan est un antidéplacement.






 le vecteur
le vecteur  étant porté par la droite (D), la symétrie par rapport à la droite (D) associe à un point M(x, y) quelconque du plan le point unique M′ (x, – y). La symétrie SD par rapport à la droite (D) est donc la transformation ponctuelle définie par (x′ = + x, y′ = – y). C’est une transformation bijective et involutive, c’est-à-dire telle que SD ∘ SD = I, identité du plan, ∘ désignant la composition des transformations ou applications du plan dans lui-même. En effet, si x′ = x et y′ = – y, on a x =x′ et y = – y′ : la transformation inverse, qui est définie, est identique à la transformation initiale SD. Sous une autre forme, la droite (D) étant la médiatrice du segment MM′, si le point M′ est le transformé du point M par SD, le point M est le transformé du point M′ par SD.
étant porté par la droite (D), la symétrie par rapport à la droite (D) associe à un point M(x, y) quelconque du plan le point unique M′ (x, – y). La symétrie SD par rapport à la droite (D) est donc la transformation ponctuelle définie par (x′ = + x, y′ = – y). C’est une transformation bijective et involutive, c’est-à-dire telle que SD ∘ SD = I, identité du plan, ∘ désignant la composition des transformations ou applications du plan dans lui-même. En effet, si x′ = x et y′ = – y, on a x =x′ et y = – y′ : la transformation inverse, qui est définie, est identique à la transformation initiale SD. Sous une autre forme, la droite (D) étant la médiatrice du segment MM′, si le point M′ est le transformé du point M par SD, le point M est le transformé du point M′ par SD.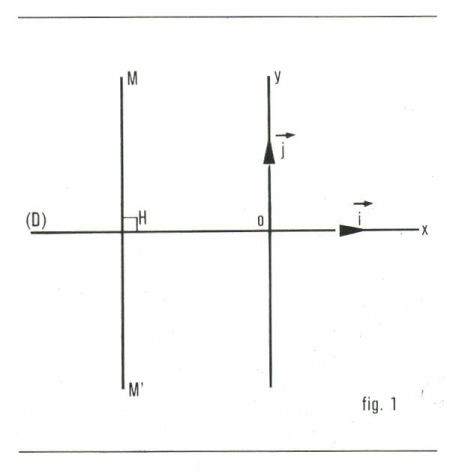
 et
et  on a, d’après le théorème de Pythagore,
on a, d’après le théorème de Pythagore,
 est transformé en un angle opposé
est transformé en un angle opposé  [fig. 2] : la symétrie par rapport à une droite, dans le plan, est un antidéplacement.
[fig. 2] : la symétrie par rapport à une droite, dans le plan, est un antidéplacement.
 et
et  dont l’angle est
dont l’angle est  modulo 2 π, on passe du point M au point M′ par la rotation de centre O et d’angle 2 π, puisque l’angle
modulo 2 π, on passe du point M au point M′ par la rotation de centre O et d’angle 2 π, puisque l’angle  est double de l’angle
est double de l’angle  et est donc indépendant du point M choisi, et que, d’autre part, OM = OM1 = OM′.
et est donc indépendant du point M choisi, et que, d’autre part, OM = OM1 = OM′.


 étant le vecteur de la translation qui transforme la droite (D) en la droite (D′). Le produit SD′ ∘ SD est donc un déplacement qui, inversement, peut être décomposé d’une infinité de manières en un produit de deux symétries d’axes parallèles :
étant le vecteur de la translation qui transforme la droite (D) en la droite (D′). Le produit SD′ ∘ SD est donc un déplacement qui, inversement, peut être décomposé d’une infinité de manières en un produit de deux symétries d’axes parallèles :
 étant la translation qui transforme la droite (D) en la droite (D′).
étant la translation qui transforme la droite (D) en la droite (D′).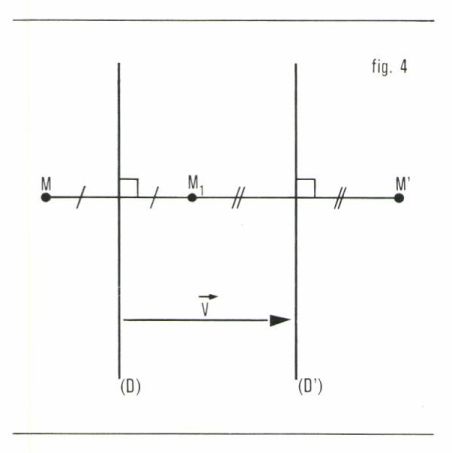

 appartenant au plan (P) qui définit la symétrie, la symétrie par rapport au plan (P) transforme le point M(x, y, z) en un point M′(x′, y′, z′) avec
appartenant au plan (P) qui définit la symétrie, la symétrie par rapport au plan (P) transforme le point M(x, y, z) en un point M′(x′, y′, z′) avec et
et  on a :
on a :
 est transformé en un trièdre
est transformé en un trièdre  dont l’orientation n’est plus celle du trièdre
dont l’orientation n’est plus celle du trièdre  : les deux trièdres ne sont pas égaux (on ne peut les faire coïncider). De façon générale, une figure est transformée en une figure inversement égale : seules les distances sont conservées. La symétrie par rapport à un plan est un antidéplacement.
: les deux trièdres ne sont pas égaux (on ne peut les faire coïncider). De façon générale, une figure est transformée en une figure inversement égale : seules les distances sont conservées. La symétrie par rapport à un plan est un antidéplacement.