




symétrie (suite)
• Produits de deux symétries par rapport à deux plans
Les deux plans sont sécants (fig. 7). Le point M est transformé en un point M1 par la symétrie SP, lequel est transformé en un point M′ par la symétrie SP′ ; le point M est transformé en M′ par le produit SP′ ∘ SP. Les trois points M, M1 et M′ appartiennent au plan (π) passant par le point M et perpendiculaire à la droite (Δ) d’intersection des plans (P) et (P′). Dans ce plan, on passe du point M au point M′ par la rotation de centre O et d’angle  et
et  étant deux axes arbitrairement choisis sur les traces (D) et (D′) des plans (P) et (P′) sur le plan (π). L’angle obtenu dans (π) est indépendant du point M choisi. On retrouve le même angle si on part d’un point M non situé dans (π) : c’est le rectiligne, ou angle plan, de l’un des dièdres orientés formés par les plans (P) et (P′). Le produit SP ∘ SP est une rotation dont l’angle est égal à
étant deux axes arbitrairement choisis sur les traces (D) et (D′) des plans (P) et (P′) sur le plan (π). L’angle obtenu dans (π) est indépendant du point M choisi. On retrouve le même angle si on part d’un point M non situé dans (π) : c’est le rectiligne, ou angle plan, de l’un des dièdres orientés formés par les plans (P) et (P′). Le produit SP ∘ SP est une rotation dont l’angle est égal à  et dont l’axe, porté par (Δ), a un sens convenable. Inversement, une rotation d’angle α autour d’un axe
et dont l’axe, porté par (Δ), a un sens convenable. Inversement, une rotation d’angle α autour d’un axe  peut être décomposée d’une infinité de manières en un produit de deux symétries-plans dont les plans passent par l’axe , l’un des dièdres déterminés par ces plans ayant un rectiligne orienté de mesure
peut être décomposée d’une infinité de manières en un produit de deux symétries-plans dont les plans passent par l’axe , l’un des dièdres déterminés par ces plans ayant un rectiligne orienté de mesure 

• Les plans sont parallèles (fig. 8). On passe du point M au point M′ par le produit SP′ ∘ SP, qui est ici une translation, dont le vecteur  est double de celui de la translation qui transforme le plan (P) en (P′). Inversement, une translation de vecteur
est double de celui de la translation qui transforme le plan (P) en (P′). Inversement, une translation de vecteur  peut être décomposée d’une infinité de façons en un produit de deux symétries-plans dont les plans sont perpendiculaires à la direction du vecteur et dont l’un se déduit de l’autre par la translation de vecteur
peut être décomposée d’une infinité de façons en un produit de deux symétries-plans dont les plans sont perpendiculaires à la direction du vecteur et dont l’un se déduit de l’autre par la translation de vecteur 

Dans les deux cas ci-dessus, on obtient comme produit de deux symétries-plans un déplacement.
Symétrie par rapport à une droite
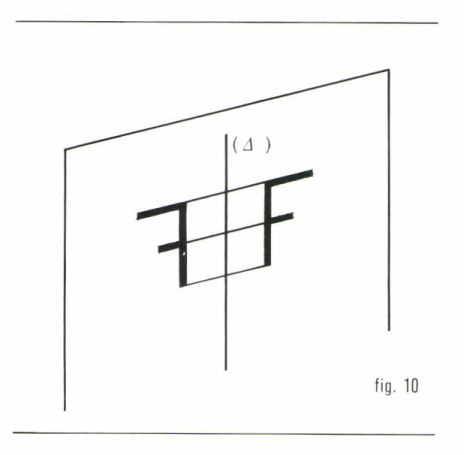
Cette transformation, appelée aussi retournement (fig. 9), n’est autre que la rotation involutive d’axe porté par la droite (Δ), de sens arbitraire. Une symétrie par rapport à une droite dans l’espace est un déplacement. Deux figures d’un même plan symétriques par rapport à une droite (Δ) de ce plan sont inversement égales dans ce plan (fig. 10), mais sont directement égales dans l’espace. On passe de l’une à l’autre par le retournement d’axe (Δ).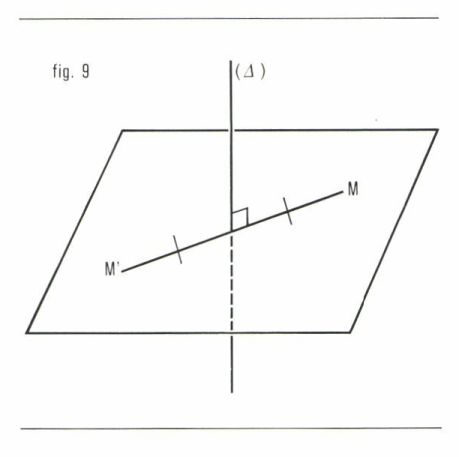
• Produit de deux retournements
Les deux axes sont parallèles (fig. 11). Les deux droites parallèles (Δ1) et (Δ2) déterminent un plan (P). Soit (Q) et (R) les plans contenant respectivement les droites (Δ1) et (Δ2), perpendiculaires au plan (P). On peut décomposer les symétries par rapport aux deux droites (Δ1) et (Δ2) en produits de deux symétries-plans :  de sorte que
de sorte que
ou  puisque SP ∘ SP = I (identité).
puisque SP ∘ SP = I (identité).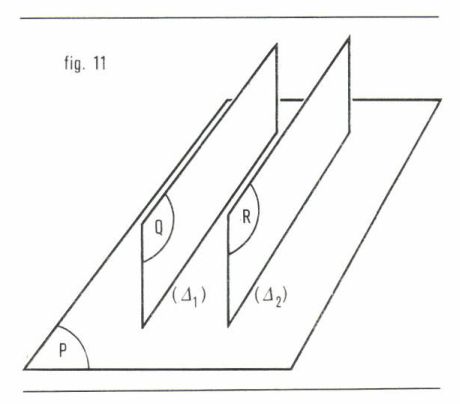
Or, le produit SR ∘ SQ est la translation de vecteur  étant le vecteur de la translation transformant (Q) en (R).
étant le vecteur de la translation transformant (Q) en (R).
Le produit de deux retournements d’axes parallèles est la translation de vecteur double de celui qui transforme un axe en l’autre.
• Les deux axes sont concourants (fig. 12). Comme précédemment, on décompose chaque retournement en un produit de deux symétries par rapport à deux plans perpendiculaires  d’où
d’où 
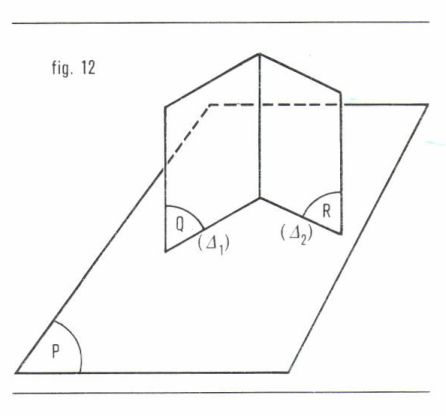
Or, le produit SR ∘ SQ de deux symétries par rapport à deux plans concourants est une rotation autour de la droite d’intersection de ces deux plans.
Le produit de deux retournements d’axes concourants est une rotation d’axe perpendiculaire au plan déterminé par les deux axes, en leur point commun, l’angle de la rotation étant le double de l’angle des deux axes.
Symétrie par rapport à un point
Cette transformation associe à tout point M de l’espace le point M′ tel que  O étant un point donné. C’est aussi une homothétie de centre O et de rapport – 1, donc un antidéplacement, puisque les distances sont conservées, mais les trièdres sont remplacés par des trièdres de sens contraires.
O étant un point donné. C’est aussi une homothétie de centre O et de rapport – 1, donc un antidéplacement, puisque les distances sont conservées, mais les trièdres sont remplacés par des trièdres de sens contraires.
1. Le produit de la symétrie de centre O et de la symétrie de centre O′ est la translation de vecteur 
2. La symétrie de centre O peut être remplacée, dans un ordre quelconque, par le produit de la symétrie par rapport à un plan (P) quelconque passant par le point O et du retournement d’axe (Δ) perpendiculaire au plan (P) en O ou par le produit de trois symétries par rapport à trois plans deux à deux perpendiculaires et passant par le point O.
Il résulte de ces propriétés que :
1o si une figure admet, parmi l’ensemble formé d’un plan, d’un point de ce plan et de la perpendiculaire en ce point au plan, deux de ces éléments comme éléments de symétrie, elle admet aussi le troisième ;
2o si une figure admet trois plans de symétrie deux à deux perpendiculaires, elle admet leur point commun comme centre de symétrie et les droites d’intersection des plans deux à deux, comme axes de symétrie.
Groupe des isométries de l’espace euclidien
L’ensemble des isométries de l’espace, c’est-à-dire des déplacements et des symétries par rapport à des points ou à des plans, est un groupe non commutatif pour la composition des transformations. L’ensemble formé des déplacements de l’espace est un sous-groupe du groupe des isométries.
Toute isométrie de l’espace est égale soit à la transformation identique, soit à une symétrie-plan, soit au produit de deux, de trois ou de quatre symétries-plans.
La symétrie dans le monde vivant
Les parties les plus régulières des plantes (fleurs) ou des animaux aquatiques fixés (polypes) ont souvent une symétrie axiale d’ordre infini ou d’ordre défini : 3 ou 6 pour les plantes monocotylédones, 5 pour la plupart des plantes dicotylédones et pour les Échinodermes. 4, 6 ou 8 pour les Cœlentérés. Une symétrie bilatérale peut, sous l’effet de l’évolution, apparaître en superposition (fleurs zygomorphes, Oursins dits « irréguliers »).
La symétrie bilatérale subsiste seule chez les animaux à déplacement rapide : Vertébrés, Arthropodes, etc.
Le remplacement du plan primitif de la symétrie par un plan qui lui est perpendiculaire s’observe chez de nombreux bivalves, dits « équilatéraux inéquivalves » (Coquille Saint-Jacques, Huître), et chez les Poissons Pleuronectes (Sole, Turbot).
Une symétrie de type sphérique, répétitive autour d’un centre, ne s’observe guère que dans le squelette des êtres unicellulaires (Radiolaires).
La symétrie des Cténaires est unique en son genre : elle se fait autour de deux plans perpendiculaires, dont l’axe commun est antéropostérieur.
Bien entendu, dès qu’un être devient un peu compliqué, certains de ses organes ont une symétrie différente de celle de l’ensemble : chez l’Homme, la symétrie (approximative) des mâchoires est perpendiculaire à celle du reste du corps, la symétrie d’un globe oculaire est axiale, etc.
Notons, enfin, que la symétrie externe recouvre souvent une dissymétrie interne (estomac à gauche, foie et appendice à droite...) et que la forme extérieure elle-même peut subir une perte brutale de symétrie d’origine génétique (incisive gauche du Narval mâle).
H. F.