automate (suite)
La lignée des automates roulants, et non pas marchants, se complète par les véhicules endomécaniques, chariots sans conducteur (1934) du Suisse Frantz Dussaud (1870-1953), et par des animaux électroniques : le chien de garde (1929) d’Henry Piraux, les tortues anglaises (1948) ELMER (Electro Mechanical Robot) et ELSIE (Electro Light Sensitive Internal External) de William Grey Walter, né en 1910 ; la famille des MISO, animaux électroniques (1949) dotés de « mémoire » d’Albert Ducrocq, ainsi que ses renards cybernétiques Job et ses sœurs Barbara, Caesare et Felapton, dont la « mémoire » est posée sur un ruban magnétique (1953). Ce sont des automates au sens étymologique du mot. Enfin, la race des automates doués de la faculté d’improviser, comme l’est le Componium, et non plus de reproduire un programme déterminé à l’avance, se retrouve en 1953 avec Calliope, ou l’imagination artificielle d’Albert Ducrocq. Calliope, robot binaire, crée des textes automatiques, lit une carte de France en huit couleurs et dessine avec des points des portraits électroniques. Le 3 mai 1961, la Compagnie des machines Bull présente la java électronique de Pierre Barbaud, première musique algorithmique, et, le 8 février 1962, l’ordinateur IBM 7090 compose pour dix instruments une musique stochastique.
Conclusion
On a souvent considéré les automates traditionnels comme des jouets, de « sublimes jouets », a-t-on concédé. En fait, tous contenaient déjà en puissance les deux principes scientifiques essentiels de l’automatisme moderne :
— l’idée de programmation ou d’information, l’automate recevant un ensemble d’instructions, simples ou complexes, qui lui sont fournies d’avance dans une « mémoire » ;
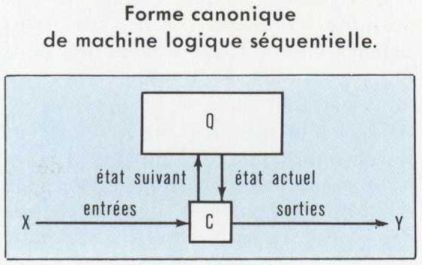
— l’idée de rétroaction ou d’action en retour, l’automate régularisant et contrôlant soi-même son action, cette rétroaction s’établissant à partir de la différence entre l’état actuel du système et son état désiré.
J. S.
A. Chapuis et E. Gelis, le Monde des automates (J. Meynial, 1928). / P. Devaux, Automates, automatisme, automation (P. U. F., coll. « Que sais-je ? », 1941 ; 6e éd., 1967). / A. Chapuis et E. Droz, les Automates (Éd. du Griffon, Neuchâtel, 1949). / A. Chapuis, Histoire de la boîte à musique et de la musique mécanique (Éd. Scriptar, Lausanne, 1955). / E. Maingot, les Automates (Hachette, 1959). / J. Sablière, De l’automate à l’automatisation (Gauthier-Villars, 1966). / A. Doyon et L. Liaigre, Jacques de Vaucanson, mécanicien de génie (P. U. F., 1967). / J. Prasteau, les Automates (Gründ, 1968).