Éd. 1971-1976
Éd. 1971-1976servomécanisme
Système asservi ou asservissement dans lequel la grandeur asservie est de nature mécanique, le plus souvent position ou vitesse, plus rarement accélération ou effort, le mouvement pouvant être rectilinéaire ou angulaire.
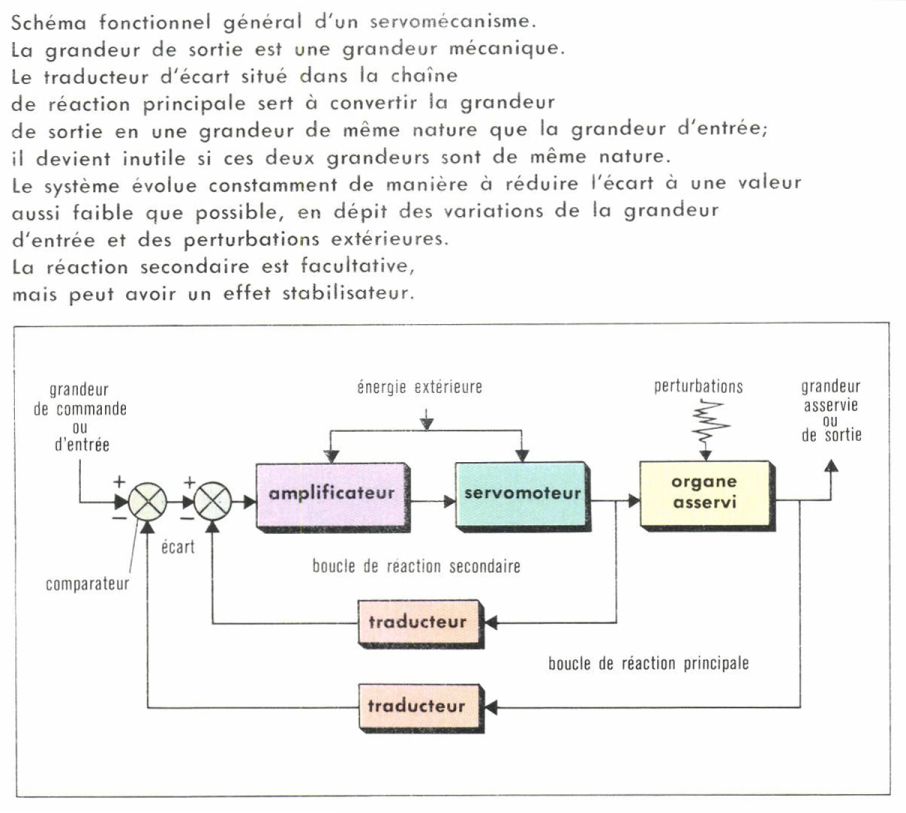
Dans un servomécanisme, la grandeur de commande peut, en principe, être de nature quelconque, mais elle est généralement une position, une vitesse ou une tension électrique. De plus, le système peut être appelé à évoluer plus ou moins rapidement dans le temps. Comme dans tout système asservi, l’action exercée sur le système commandé résulte de l’amplification de l’écart entre la valeur désirée et la valeur effective de la grandeur asservie, le système évoluant à chaque instant de manière à réduire l’écart à une valeur aussi faible que possible, en dépit des variations de la grandeur de commande et des perturbations extérieures qui agissent sur le système commandé. L’action exercée sur ce système peul être soit une simple action proportionnelle ou par intégration, soit une action complexe résultant de la combinaison de termes proportionnels, par intégration et par dérivation, afin de satisfaire les exigences contradictoires de la stabilité et de la précision. L’organe d’action, ou actionneur, est un moteur linéaire ou rotatif électrique ou hydraulique. L’amplificateur d’écart peut être électrique, électronique, magnétique, pneumatique ou hydraulique, ou mixte. Il en est de même des dispositifs de mesure de la grandeur asservie et d’élaboration de l’écart (détecteur d’écart ou comparateur). Enfin, l’organe de commande et l’organe asservi peuvent être séparés par une distance plus ou moins grande : on parle alors de commande à distance, ou télécommande.
Servomécanismes de position
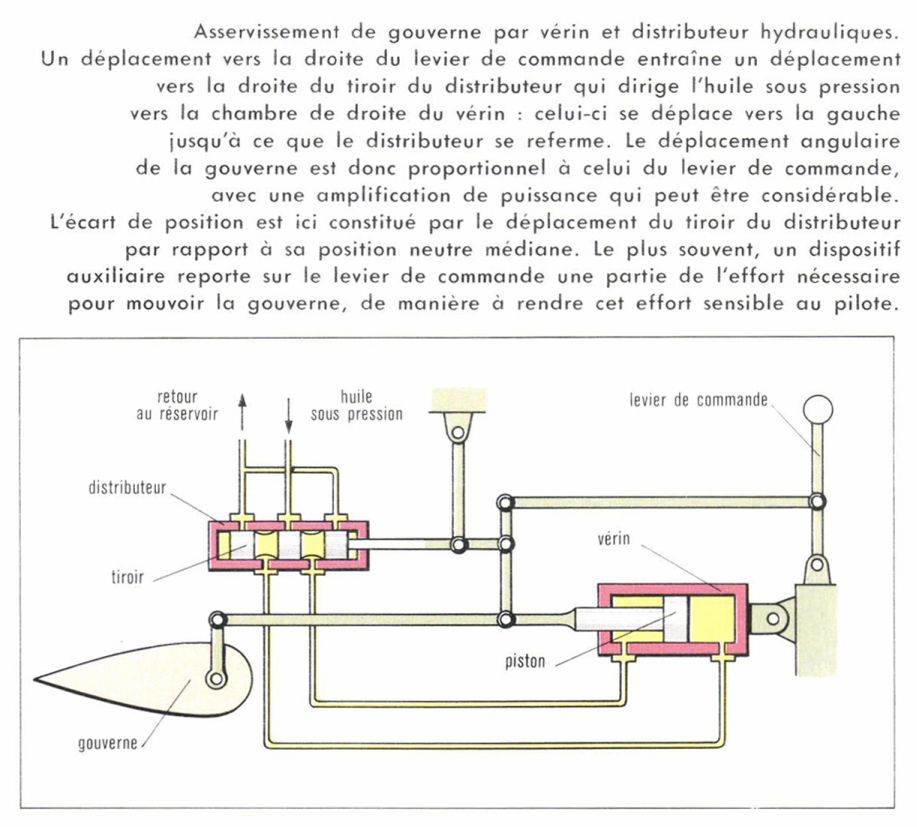
Dans les servomécanismes de position commandés par un organe tel qu’un levier, l’écart de position peut parfois être mesuré par un dispositif mécanique simple. C’est le cas pour les asservissements de gouvernes d’avions, dans lesquels, si la distance entre le levier de commande et la gouverne n’est pas trop grande, l’écart de position peut être élaboré au moyen d’un simple jeu de leviers. Cet écart, exprimé mécaniquement par un déplacement, peut être communiqué au tiroir d’un distributeur hydraulique qui gouverne l’admission de l’huile dans un vérin entraînant la gouverne. Si la distance est trop grande, on mesurera séparément la position du levier et celle de la gouverne sous la forme de deux tensions électriques, dont la différence, convenablement amplifiée, commandera les déplacements du tiroir du distributeur par l’intermédiaire d’un moteur à solénoïde ou encore commandera directement la rotation du moteur d’un vérin électrique.
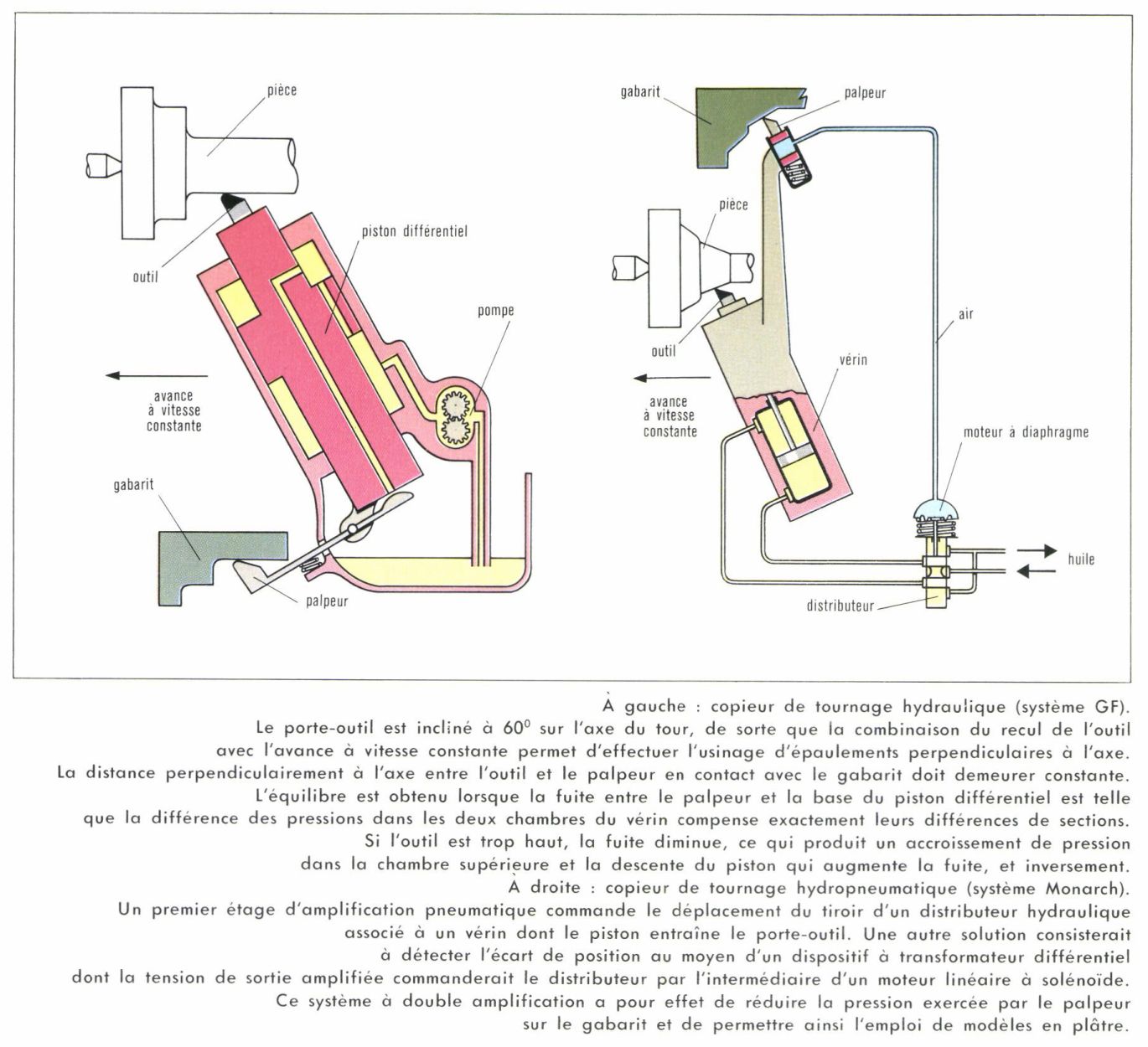
Dans certains dispositifs, tels que les copieurs, l’écart de position est directement disponible sous forme d’un petit déplacement différentiel du palpeur par rapport au gabarit définissant la forme désirée. Selon que l’on accepte ou non une pression relativement importante du palpeur sur le gabarit, le système peut être entièrement hydraulique ou hydropneumatique. Ces appareils servent pour le tournage et le fraisage.
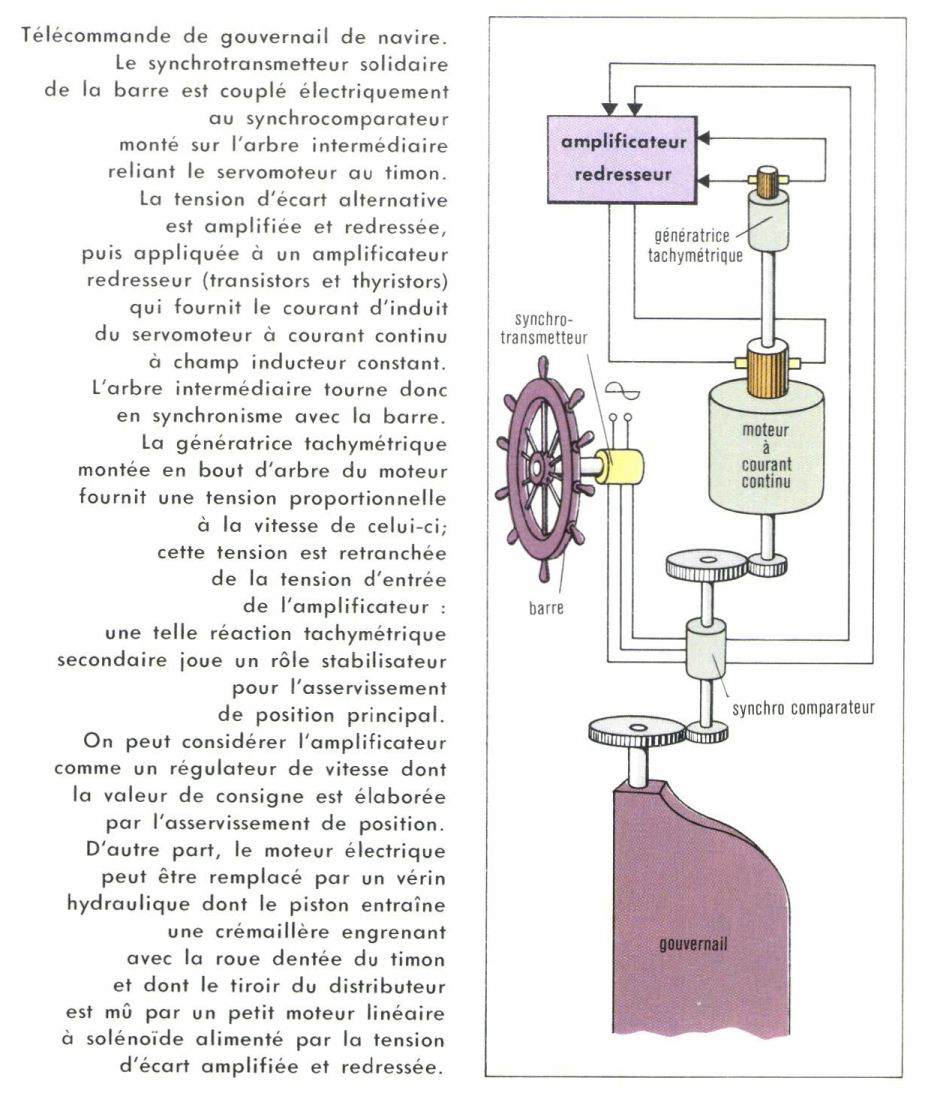
Pour réaliser une télécommande synchrone entre deux arbres, un arbre menant et un arbre mené, séparés par une distance plus ou moins grande, il faut pouvoir déterminer leur écart angulaire. On utilise pour cela des machines électriques spéciales, appelées synchromachines et, plus communément, selsyns, un synchrotransmetteur sur l’arbre menant et un synchrocomparateur sur l’arbre mené, qui fournit la tension électrique d’écart. On emploie généralement deux couples de synchromachines : un couple d’approche, dont les machines sont directement solidaires des deux arbres, et un couple de précision, dont les machines sont reliées à ces arbres par l’intermédiaire d’engrenages multiplicateurs. Un dispositif de commutation substitue le couple de précision au couple d’approche lorsque l’écart angulaire devient inférieur à une certaine valeur. Il existe également des synchromachines spéciales à grand nombre de pôles, qui permettent de constituer un système de mesure angulaire de précision sans recourir à une multiplication par engrenages. Les applications des télécommandes synchrones sont innombrables : télécommande des gouvernes des navires et des avions, télépointage des canons et des rampes de lancement de missiles, entraînement mutuel de machines devant fonctionner en synchronisme en papeterie et en métallurgie, etc. Le servomoteur peut être un moteur électrique, le plus souvent un moteur a courant continu, dont le courant d’induit est fourni par une génératrice à courant continu (groupe Ward-Leonard) ou par un redresseur à thyristors permettant d’engendrer une tension réglable proportionnellement à l’écart, ou encore par un moteur hydraulique rotatif alimenté par une pompe à débit variable, dont le levier de réglage du débit est mû par un petit moteur auxiliaire à aimant permanent ou biphasé, commandé lui-même par la tension d’écart amplifiée. L’amplification de la tension d’écart pour engendrer le courant inducteur de la génératrice ou la tension de commande du redresseur à thyristors ou du moteur auxiliaire est presque toujours effectuée au moyen de circuits à transistors.
Servomécanismes de vitesse
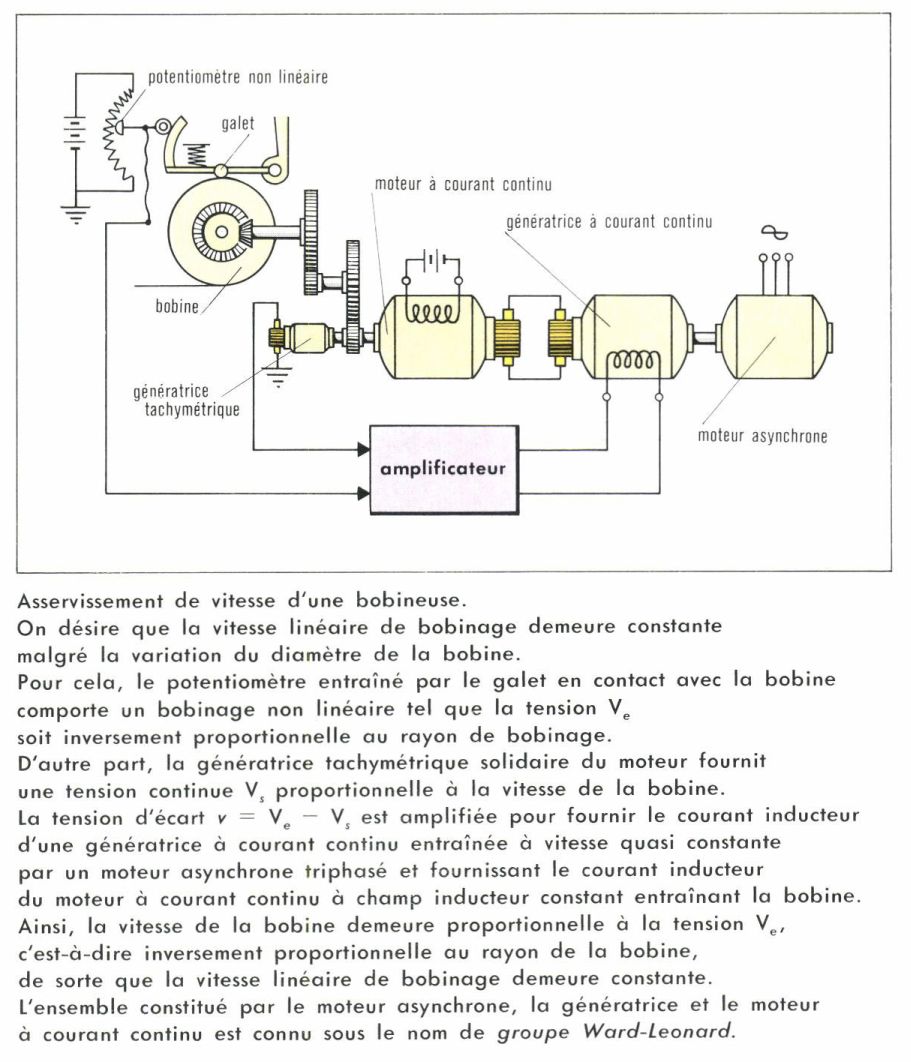
Dans un asservissement de vitesse, la grandeur asservie est une vitesse linéaire ou angulaire. Les vitesses angulaires peuvent être mesurées au moyen de dispositifs mécaniques à force centrifuge, tels que celui du régulateur à boules de James Watt (1736-1819), ou, plus communément dans le domaine des servomécanismes, au moyen de génératrices tachymétriques électriques à courant continu ou alternatif. Par comparaison de la tension de mesure avec la tension de référence définissant la vitesse désirée, on crée une tension d’écart qui, convenablement amplifiée, permet de régler la vitesse d’un moteur électrique ou hydraulique entraînant l’organe asservi. Il est ainsi possible, en particulier, d’asservir la vitesse d’un arbre secondaire à celle d’un arbre primaire, en mesurant les vitesses des deux arbres au moyen de deux génératrices tachymétriques et en faisant la différence des deux tensions de mesures pour produire la tension d’écart. Mais, bien que les deux arbres tournent à la même vitesse, leurs positions angulaires ne se correspondent pas exactement comme dans une télécommande synchrone. La vitesse d’un arbre peut également être asservie à suivre une loi quelconque définie par une tension électrique variable dans le temps. On peut, par exemple, faire varier la vitesse d’une bobine en raison inverse de son diamètre de manière que la vitesse linéaire de bobinage ou de débobinage demeure constante. On peut, de même, faire varier la vitesse de la broche d’un tour en raison inverse du diamètre d’usinage pour obtenir une vitesse linéaire de coupe constante. De tels asservissements de vitesse sont d’un usage courant dans l’industrie mécanique, en métallurgie et en papeterie.
La grandeur asservie peut aussi être une force telle que la force de traction subie par un matériau en fil ou en bande soumis à une opération de bobinage ou de débobinage, qui doit généralement demeurer constante. Pour cela, la force est mesurée au moyen d’un dynamomètre qui, le plus souvent, élabore directement l’écart servant à régler la vitesse de la bobine.