Voici brièvement résumée la conception actuelle de cette régulation. Au voisinage du gène responsable de la synthèse de β-galactosidase existe un gène dit « régulateur » qui synthétise une protéine particulière : le répresseur. Ce répresseur a la propriété de se fixer sur un site spécifique du chromosome, l’opérateur ; l’association opérateur-répresseur empêche la transcription de l’acide ribonucléique à partir du gène « β-galactosidase », ce qui bloque la synthèse d’enzyme. En présence de lactose, il se formerait un complexe répresseur-lactose (ou dérivé du lactose) qui ne possède pas d’affinité pour le site opérateur ; dans ces conditions, l’opérateur étant « libre », la synthèse enzymatique peut s’effectuer. On ne peut, bien entendu, généraliser les mécanismes particuliers qui viennent d’être décrits à l’ensemble des synthèses protéiques. Cet exemple donne cependant une notion de ce que peut être une régulation au niveau des gènes.
Les exemples choisis se caractérisent par leur relative simplicité. D’autres systèmes sont beaucoup plus complexes, et leurs mécanismes controversés. On ne peut, en effet, établir un schéma précis d’une régulation que dans la mesure où l’on connaît la totalité des facteurs susceptibles d’intervenir, ce qui n’est pratiquement jamais le cas ; de ce point de vue, le lecteur doit considérer les divers schémas qui lui ont été proposés comme des approximations susceptibles d’être modifiées par l’acquisition de nouvelles données.
Branche de l’automatique qui traite des systèmes asservis, ou asservissements industriels, dans lesquels la grandeur d’entrée ou de référence, dont la valeur est appelée valeur de consigne ou simplement consigne, est constante ou varie lentement dans le temps.
On distingue la régulation de maintien, dans laquelle la valeur de consigne est constante, mais réglable, de la régulation de correspondance, dans laquelle elle varie en fonction du temps ; si la loi de variation de la consigne est imposée a priori, on parle de régulation à programme. On distingue encore la régulation simple, portant sur une grandeur réglée unique, de la régulation multiple, portant sur plusieurs grandeurs réglées associées à un même processus. Il n’existe aucune différence fondamentale entre les systèmes à régulation et les systèmes asservis en général.
La grandeur réglée est une grandeur physique caractérisant l’état d’un processus de fabrication, d’une chaudière, d’un réacteur chimique ou nucléaire, etc. (pression, température, débit de fluide, niveau, concentration), et le traducteur de sortie est essentiellement un appareil de mesure. La grandeur réglante est une grandeur telle que le débit d’un fluide ou l’intensité d’un courant électrique qui agit sur l’état du système réglé ; sa valeur est fixée par un organe de réglage, vanne ou rhéostat par exemple, commandé par un organe d’action ou actionneur piloté lui-même par le régulateur. Ce dernier réagit aux variations de l’écart entre la valeur de consigne et la valeur effective de la grandeur réglée de manière à le réduire, comme dans tout système asservi.
Mode de régulation
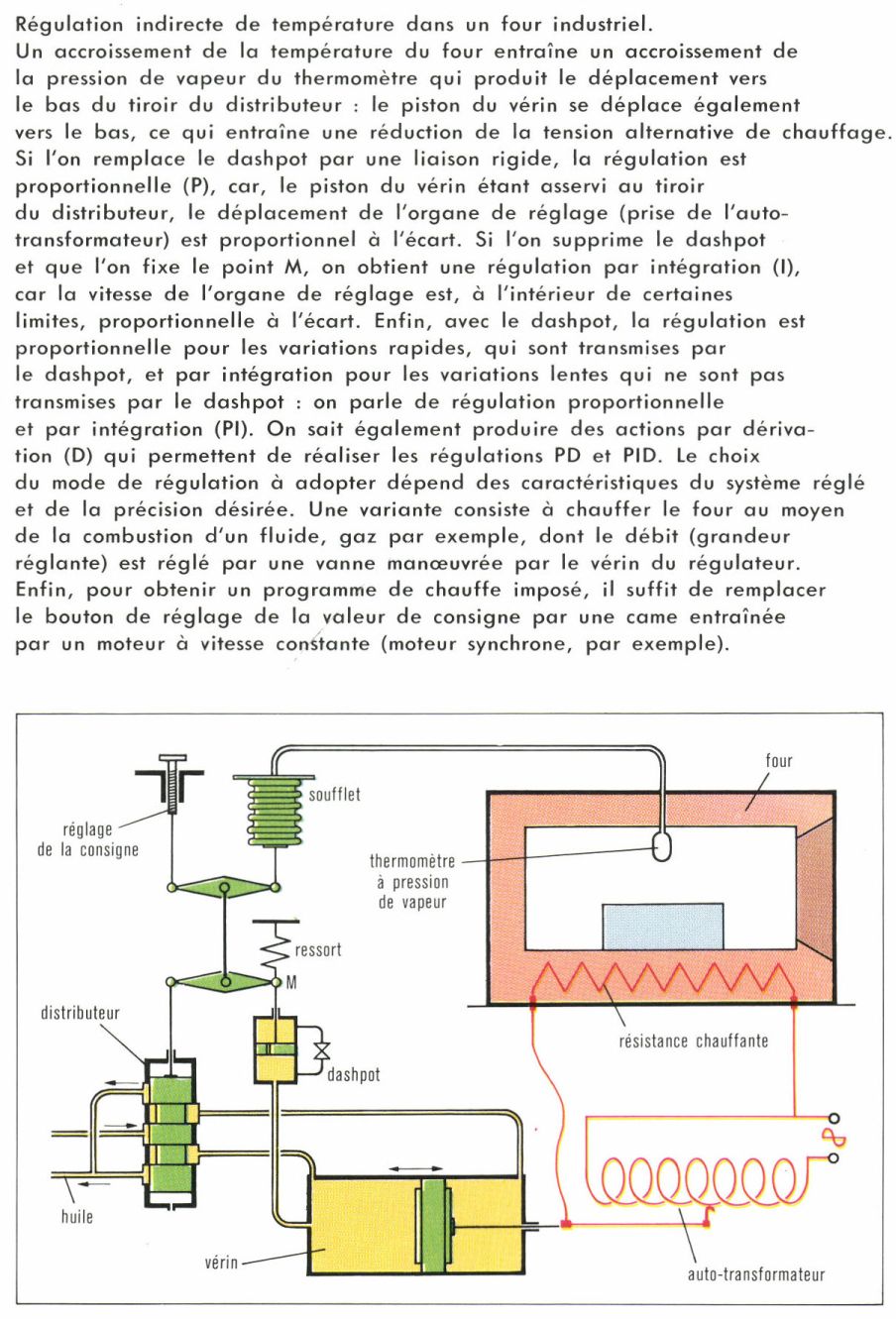
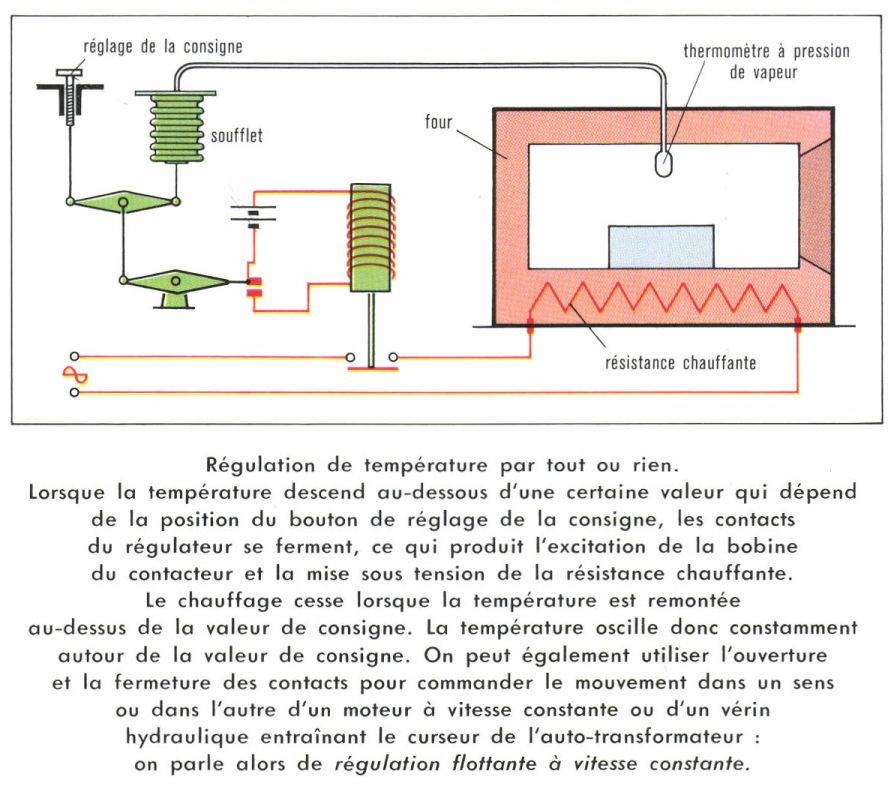
L’action de régulation résulte de la combinaison d’actions proportionnelles, par intégration et par dérivation, selon les caractéristiques du système réglé et les performances de stabilité et de précision désirées. La régulation proportionnelle, dite « P », est la plus simple, mais présente l’inconvénient, pour un système réglé lui aussi proportionnel en régime statique, de laisser subsister un écart permanent, puisqu’aussi bien il faut un écart non nul pour produire une grandeur réglante non nulle, donc une grandeur réglée non nulle. De plus, en raison du temps de réponse fini du système réglé, le facteur d’action proportionnelle ne peut prendre une valeur trop élevée, au risque de voir le système devenir instable et entrer en auto-oscillation. L’inconvénient d’un écart permanent peut être évité par l’introduction d’un terme d’action par intégration (régulation PI) ou par la substitution d’une action par intégration à l’action proportionnelle (régulation I) ; il disparaît également si le système réglé lui-même se comporte comme un intégrateur, la vitesse de variation de la grandeur réglée étant proportionnelle à la grandeur réglante en régime établi. D’autre part, l’introduction d’un terme d’action par dérivation retarde l’apparition de l’instabilité et permet d’augmenter le terme d’action proportionnelle et, par suite, la précision de régulation : on obtient ainsi les régulations PD et PID. Il existe également des régulateurs par « tout ou rien », comme ceux des réfrigérateurs domestiques, qui se contentent de mettre la pompe de circulation en marche dès que la température dépasse une certaine valeur, d’ailleurs réglable, et de l’arrêter lorsque la température a repris une valeur convenable ; des régulateurs par « tout ou peu », qui donnent à la grandeur réglante sa valeur maximale ou une valeur intermédiaire, et des régulateurs par « plus ou moins », qui donnent à la grandeur réglante deux valeurs de signes opposés.
Bien que, si l’on se contente d’une précision médiocre, on puisse se contenter de régulateurs à action directe empruntant leur énergie de manœuvre au système réglé, les régulateurs et les actionneurs reçoivent généralement de l’énergie d’une source extérieure, qui est presque toujours, directement ou indirectement, le réseau de distribution d’énergie électrique, et réalisent ainsi une amplification de l’écart. Les régulateurs font appel aux techniques les plus diverses : pneumatiques, hydrauliques, électriques, électromécaniques, électroniques.
Les actionneurs sont constitués par des moteurs électriques, des vérins hydrauliques ou pneumatiques, des moteurs pneumatiques à membrane, etc., agissant sur des organes de réglage tels que vannes, rhéostats, transformateurs à rapport variable, variateurs mécaniques ou hydrauliques, contacteurs, etc.