




photogrammétrie (suite)
Orientation absolue du modèle
Il faut orienter le modèle de façon que la direction verticale SV de l’objet soit parallèle à l’axe Sz de l’appareil de restitution. L’angle i de ces deux directions (fig. 9) se décompose en Ω, rotation autour de l’axe Sx (basculement en y), et en Ф, rotation autour de l’axe Sy (basculement en x). La détermination de ces deux angles de basculement nécessite la connaissance des cotes de trois points identifiés au moins, non situés en ligne droite. Les basculements doivent déplacer le modèle comme un bloc solide, sans modifier l’orientation relative des deux faisceaux ; selon les appareils, ils s’introduisent soit en basculant l’ensemble de la base et des faisceaux, soit en laissant la base fixe et en agissant sur les paramètres ω et φ de chacun des faisceaux ; il faut alors modifier les composantes de la base bx, by et bz pour ne pas changer leur orientation relative.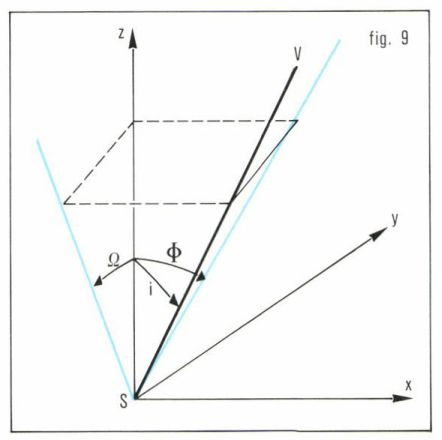
L’orientation absolue du modèle étant réalisée, une translation Δz de l’origine des cotes de l’appareil permet de la faire coïncider avec l’origine des cotes du modèle. La coïncidence planigraphique entre les points connus reportés par leurs coordonnées sur la carte et les projections de leurs homologues du modèle sera assurée par une translation et une rotation de la carte dans son plan.
Restitution stéréophotogrammétrique
Le modèle formé apparaît aux yeux du stéréorestituteur comme une image en relief, semblable à la surface de l’objet ; il peut être parcouru par un index repère mobile dans les trois dimensions, que l’on peut poser et déplacer sur la surface optique, reconstituée avec une grande précision grâce à la vision stéréoscopique. La position de cet index, définissant les trois coordonnées du point restitué du modèle, est transmise par les liaisons optiques et mécaniques de l’appareil de restitution au dispositif traceur de la planigraphie et enregistreur des cotes-appareil donnant une représentation graphique et cotée de ce point. La restitution planimétrique de toute ligne du modèle peut être tracée sur un support plan en la suivant avec l’index repère sur la surface optique.
La représentation cotée se fait par « courbes de niveau ». En maintenant constante l’une des coordonnées, z par exemple, de l’index, que l’on déplace en x et y en le laissant constamment en contact avec la surface du modèle, on décrit l’intersection de cette surface par le plan horizontal de cote z et on la trace sur le même support que la restitution planimétrique.
Appareils stéréophotogrammétriques
Il existe trois grandes catégories d’appareils de restitution stéréophotogrammétrique.
Appareils à double projection optique
Le modèle résultant de la superposition de deux images projetées est réel et examiné le plus souvent en anaglyphes dans l’obscurité. Un index repère (point lumineux) porté par un écran horizontal mobile en x, y, z est amené en coïncidence avec le point M à restituer. Une parallaxe entre les deux images se traduit par un dédoublement apparent de l’index. Un crayon traceur lié à l’écran reporte la position de M sur la carte ; la cote de M est lue à l’échelle du modèle sur une règle graduée verticale.
Appareils à matérialisation mécanique
L’intersection des deux tiges spatiales matérialisant les rayons perspectifs représente le point restitué M d’un modèle virtuel ; trois chariots X, Y et Z commandés par deux volants x et y et par un disque-pédale z, lui font parcourir le modèle et entraînent le dispositif traceur ; deux objectifs mobiles parallèlement au plan des clichés renvoient aux oculaires les images homologues des points m1 et m2, qui sont vus stéréoscopiquement et peuvent être mis en coïncidence avec deux index repères qui se fusionnent alors en un index unique.
Appareils à matérialisation mécanique et optique
Les faisceaux perspectifs sont à reconstitution optique, avec des lunettes pivotantes qui observent les clichés à travers les objectifs des chambres de projection ; lunettes et chambres sont guidées par des règles planes dont les intersections matérialisent le point restitué. Le modèle virtuel est observé stéréoscopiquement ; ce genre d’appareil, qui était le plus répandu au début de la stéréophotogrammétrie, se raréfie actuellement au profit des appareils à matérialisation mécanique.
Autres méthodes photogrammétriques
Redressement photographique
C’est la méthode d’exploitation photogrammétrique la plus simple. Mise au point au début du xxe s., cette méthode consiste à transformer une photographie inclinée en une photographie redressée c’est-à-dire telle qu’elle serait si elle avait été impressionnée avec l’axe de prise de vue perpendiculaire à la surface de l’objet, en amenant en coïncidence au moins quatre points connus de l’image projetée sur un écran avec leurs homologues reportés sur une feuille de projection. Elle convient bien dans le cas de photographie aérienne d’un terrain plan et horizontal ainsi que dans celui de photographie architecturale d’une façade. Elle est appliquée au moyen d’appareils photographiques redresseurs, dans lesquels les conditions géométriques et optiques pour que la photographie originale et la photographie redressée soient en perspective sont assurées par huit paramètres, dont certains sont commandés manuellement et d’autres automatiquement par des mécanismes analogiques.
Orthophotographie
La méthode du redressement photographique n’est valable que dans le cas d’un objet plan : en présence de relief, la photo redressée n’a pas de qualités métriques. Pour éviter ces défauts, il faut, d’une part, disposer d’un appareil de stéréorestitution et de deux clichés se recouvrant stéréoscopiquement, sur lesquels des points connus identifiés permettent l’orientation absolue, et, d’autre part, réaliser une orthophotographie. Celle-ci s’obtient sur un film horizontal mobile en z, insolé point par point, en plaçant constamment le film à la hauteur Δz exacte du point M du modèle ; l’insolation se fait par une fente mobile étroite animée d’un mouvement uniforme, parcourant le modèle en suivant des lignes parallèles successives. L’orthophotographie obtenue est à une échelle constante quel que soit le relief de l’objet.