




moteur électrique (suite)
• Marche en charge. Si l’on augmente le couple de freinage Γ appliqué au moteur, la vitesse diminue rapidement, ce qui est en général gênant et limite le domaine d’emploi de ce type de moteur. Par contre, la puissance électrique absorbée est automatiquement limitée, ce qui permet d’obtenir des couples très élevés sans risque de surcharge. Le moteur série est donc parfaitement adapté à la traction électrique (locomotives, locotracteurs, engins de levage). Dans tous les cas où l’on utilise des puissances élevées, le démarrage nécessite un rhéostat destiné à limiter le courant absorbé lorsque la f.c.é.m. du moteur est très petite. Un « rhéostat de champ » permet de réduire le courant d’excitation afin de faire varier, dans une certaine limite, la vitesse.

Le moteur « shunt »
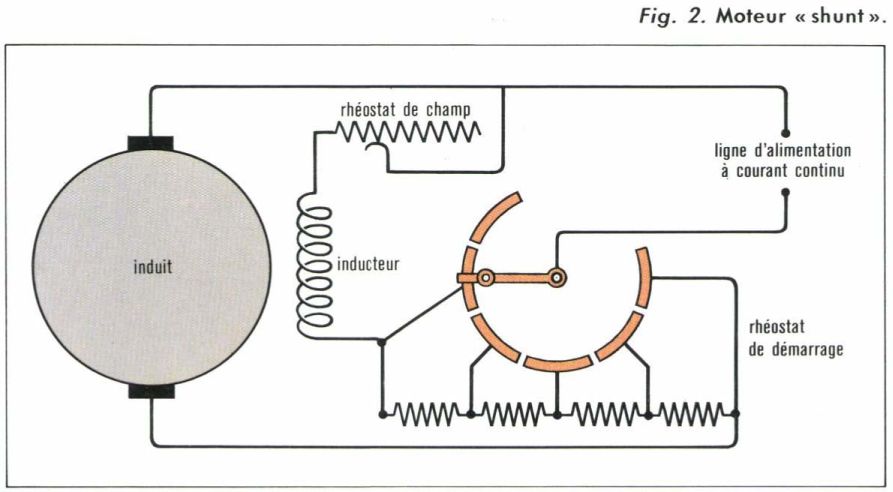
L’inducteur d’un tel moteur (fig. 2) est alimenté en dérivation. L’enroulement correspondant est réalisé à l’aide d’un grand nombre de spires de fil fin. Le flux inducteur est alors indépendant du courant absorbé par l’induit. Il est constant en première approximation. La loi d’Ohm appliquée au circuit de l’induit s’écrit encore U = E′ + RI. Si le terme RI est petit devant E′ (afin que le rendement soit élevé), E′ ≃ U.
Φ,  N étant constants, la vitesse est pratiquement constante quel que soit le couple résistant. Le moteur shunt est donc autorégulateur de vitesse. Il est utilisé pour l’entraînement des machines-outils, laminoirs, dérouleurs de papier, tissages, etc. Comme pour le moteur série, un rhéostat de champ permet d’ajuster sa vitesse en agissant sur le flux inducteur. Il est cependant plus commode d’agir, à flux constant, sur la tension alimentant l’induit. On peut obtenir ainsi toutes les vitesses de rotation comprises entre la vitesse nominale et l’arrêt complet (dispositif Ward Léonard, variateurs électroniques à redresseurs contrôlés). Dans le cas où l’alimentation est faite par un générateur à tension constante, un rhéostat de démarrage est nécessaire comme pour le moteur série.
N étant constants, la vitesse est pratiquement constante quel que soit le couple résistant. Le moteur shunt est donc autorégulateur de vitesse. Il est utilisé pour l’entraînement des machines-outils, laminoirs, dérouleurs de papier, tissages, etc. Comme pour le moteur série, un rhéostat de champ permet d’ajuster sa vitesse en agissant sur le flux inducteur. Il est cependant plus commode d’agir, à flux constant, sur la tension alimentant l’induit. On peut obtenir ainsi toutes les vitesses de rotation comprises entre la vitesse nominale et l’arrêt complet (dispositif Ward Léonard, variateurs électroniques à redresseurs contrôlés). Dans le cas où l’alimentation est faite par un générateur à tension constante, un rhéostat de démarrage est nécessaire comme pour le moteur série.
Rendement des moteurs à courant continu
Les causes de pertes de puissance sont nombreuses : puissance électrique perdue dans l’inducteur, dans la résistance de l’induit, dans les enroulements auxiliaires, par hystérésis et courants de Foucault dans l’armature rotorique ; puissance mécanique perdue par frottements et ventilation. Le rendement global — quotient de la puissance électrique absorbée et de la puissance mécanique fournie — reste cependant très bon (0,80 à 0,95 pour les grosses machines).
Autres types de moteurs à courant continu
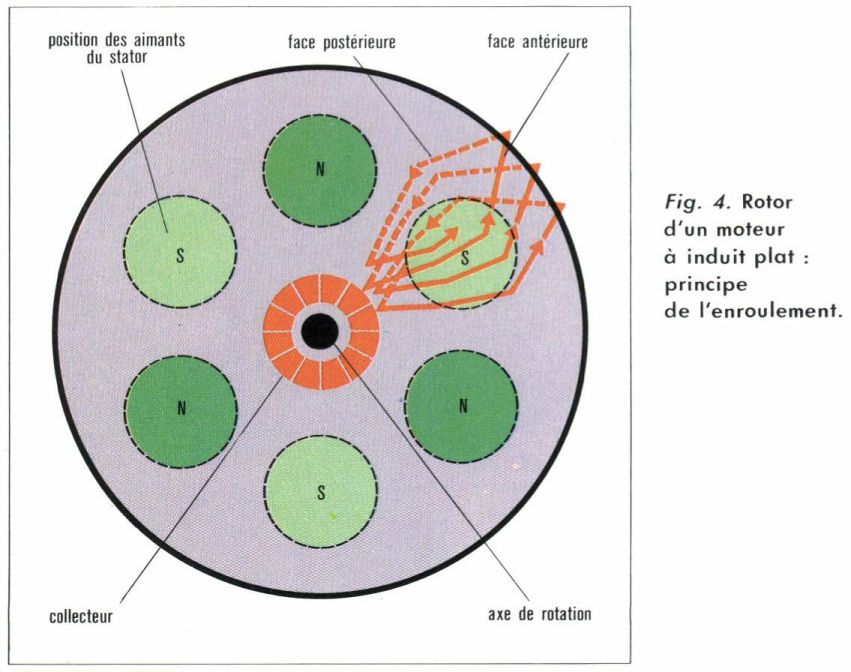
Les progrès accomplis dans la construction des aimants permanents permettent aujourd’hui la construction de moteurs pour lesquels l’inducteur est remplacé par un aimant. Cette technique, très utilisée pour les petits moteurs (servomécanismes, jouets), s’applique maintenant à des puissances beaucoup plus grandes (plusieurs dizaines de kilowatts). Les moteurs à rotor plat (ou rotor imprimé), utilisés lorsque l’inertie de la partie tournante doit être faible, appartiennent à cette catégorie (fig. 3 et 4). Le stator de ces moteurs est constitué d’un assez grand nombre d’aimants (de l’ordre de la dizaine), dont les lignes d’induction se referment à travers l’isolant très mince de l’induit. L’enroulement induit est obtenu suivant la technique du circuit imprimé. Il comporte obligatoirement un nombre de spires réduit. Il est donc plus facile à réaliser pour des tensions d’utilisation faibles. La puissance spécifique de ce type de moteur est très élevée, et la vitesse de rotation peut être grande.

Les moteurs à courant alternatif
Parmi les très nombreux dispositifs utilisés, on peut distinguer deux groupes particulièrement importants : les moteurs « synchrones » et les moteurs « asynchrones ». Ces deux types de machines fonctionnent à l’aide du « champ tournant » créé par l’armature statorique.
Principes de fonctionnement
Suspendons à un fil un aimant en U (fig. 5). En un point M de l’axe matérialisé par le fil, dans le plan des pôles N et S de l’aimant, existe un champ magnétique BM dont la direction est parallèle à l’axe nord-sud de l’aimant. Si l’on fait tourner l’aimant autour du fil de suspension, le champ BM garde une valeur constante, mais sa direction suit celle de l’aimant. On a créé en M un « champ tournant », que l’on peut représenter par un vecteur de longueur constante dont la direction tourne à la vitesse angulaire Ω de l’aimant. Une aiguille aimantée, de moment magnétique ℳ, placée en M, est soumise à un couple électromagnétique
Si elle n’est pas freinée, elle est entraînée à une vitesse rigoureusement égale à celle de l’aimant : on a réalisé ainsi un moteur « synchrone » dans lequel le rotor, constitué par l’aiguille aimantée, est entraîne au synchronisme par le champ tournant dû à l’aimant. Si l’on remplace l’aiguille par un disque de cuivre massif, la rotation de l’aimant induit dans le cuivre des courants dont l’effet s’oppose à la cause qui les a produits (loi de Lenz). Cette cause est la rotation relative du champ par rapport au disque. Si le disque n’est pas freiné, il se trouve entraîné par le champ, mais sa vitesse de rotation est obligatoirement inférieure à celle du champ. S’il n’en était pas ainsi, il n’y aurait plus de courant induit, donc plus de couple électromagnétique. Tel est le principe de fonctionnement des moteurs asynchrones, quelquefois appelés moteurs à induction.
Moteur synchrone
Un champ tournant analogue à celui qui est produit par la rotation d’un aimant peut être obtenu à l’aide de bobines fixes dans l’espace alimentées par des courants polyphasés (théorème de Ferraris). C’est ce que réalise normalement le stator d’un alternateur triphasé connecté à un réseau. Le rotor d’une telle machine étant l’équivalent d’un électro-aimant, si on alimente simultanément le stator en courant alternatif triphasé et le rotor par un courant continu dit « d’excitation », on obtient un dispositif dont le fonctionnement électromagnétique est tout à fait semblable à celui qui est constitué par un aimant en rotation entraînant une aiguille aimantée. Un alternateur polyphasé couplé à un réseau est donc une machine réversible capable de fournir un couple moteur important à condition que la vitesse du rotor permette un synchronisme rigoureux entre le champ tournant dû à l’armature fixe et le champ inducteur. Un tel moteur possède deux inconvénients importants : il ne peut pas démarrer seul, car le couple moyen résultant du défilement rapide de pôles de noms contraires devant le champ fixe du rotor immobile est nul ; il risque d’autre part un « décrochage » résultant du même phénomène si accidentellement le couple résistant devient supérieur au couple moteur.