alternateur (suite)
Constitution
L’aimant est remplacé par un électroaimant, constitué d’une armature ferromagnétique destinée à canaliser le flux produit par l’enroulement inducteur. L’ensemble enroulement-armature mobile constitue le rotor. Le cadre est remplacé par un cylindre fixe portant l’enroulement d’induit. L’ensemble armature fixe-enroulement est appelé stator.
Le rotor
Parmi les alternateurs utilisés sur les grands réseaux, on distingue deux types : le turboalternateur et l’alternateur-volant, différant essentiellement par leur rotor.
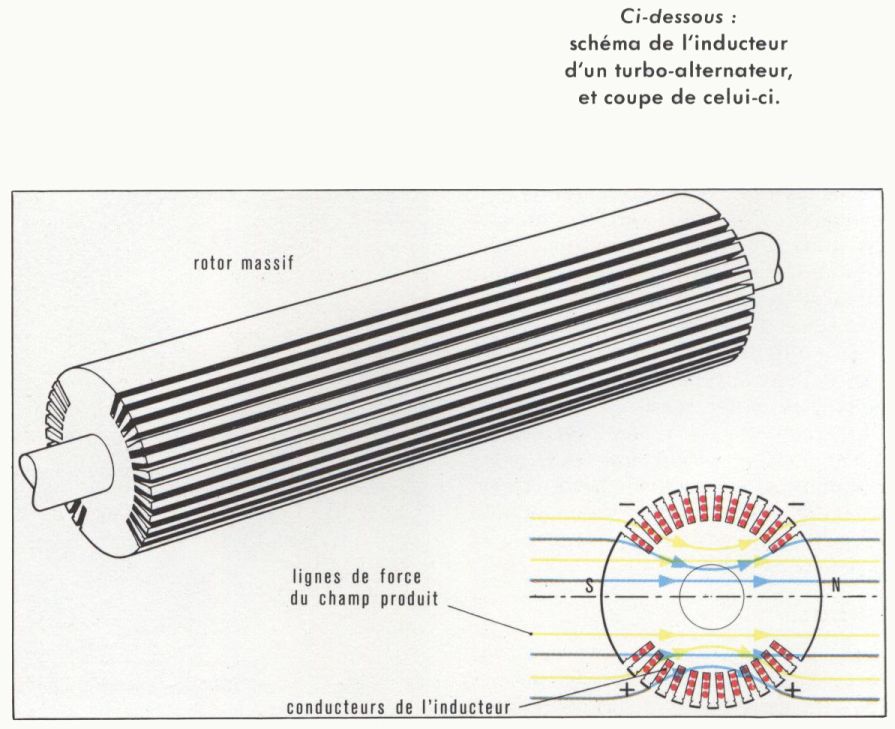
a) Le turbo-alternateur. C’est une machine à rotation rapide. Pour résister à la force centrifuge, le rotor est massif et coulé d’une seule pièce. Sa forme est très allongée (diamètre de 1 m environ, pour une longueur de 10 m).
L’enroulement inducteur est constitué par des barres longitudinales noyées dans des encoches fraisées à la surface du rotor. Toutes les barres situées sur une même demi-circonférence sont parcourues par le courant inducteur dans le même sens. Le rotor est donc équivalent à un aimant droit. Remarquons encore que si l’on désire obtenir aux bornes d’un conducteur de l’induit une tension sinusoïdale, il faut que la répartition du champ sur la périphérie de l’inducteur soit aussi sinusoïdale. On s’efforce d’obtenir ce résultat en étudiant une répartition non homogène des barres de l’inducteur et des encoches où elles sont logées tout autour du rotor. En résumé, le rotor d’un turbo-alternateur est bipolaire. Pour un conducteur de l’induit, le flux ne s’inverse qu’une fois par tour. À chaque tour du rotor ne correspond donc qu’une période du courant induit. Si le réseau utilisateur est à 50 Hz, une période dure 1/50 de seconde. La vitesse du rotor doit être de 50 tours par seconde, soit 3 000 tours par minute, vitesse considérable pour de très grosses machines, bien adaptée cependant aux turbines à vapeur des centrales thermiques.
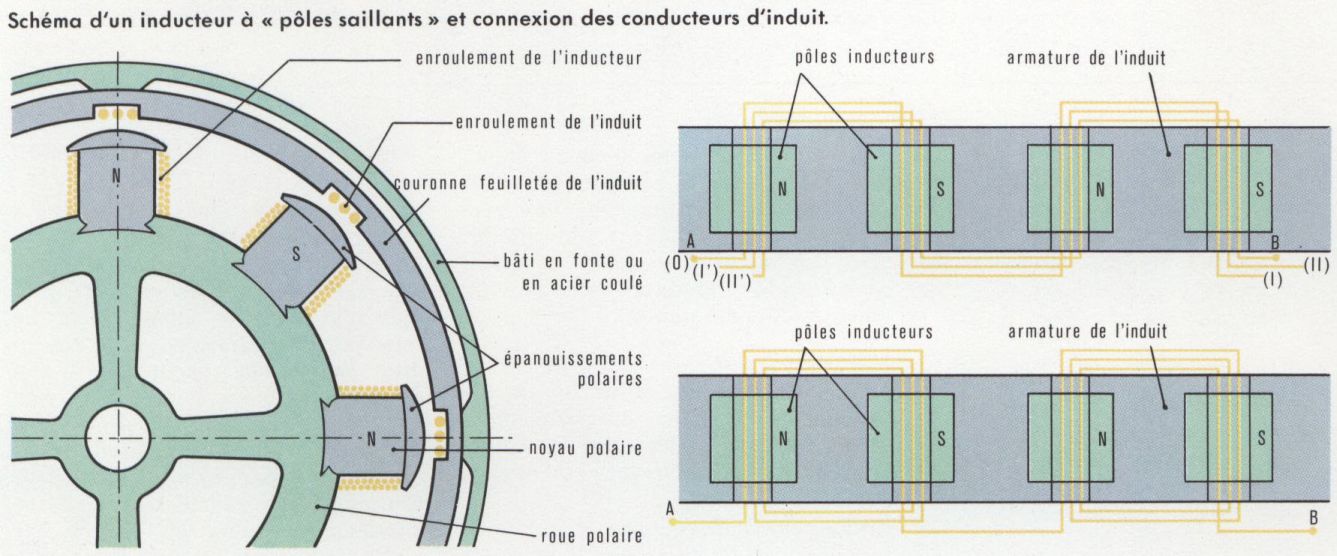
b) L’alternateur-volant. Lorsque la machine d’entraînement tourne beaucoup moins vite (turbines hydrauliques), on peut obtenir la même fréquence en multipliant le nombre des pôles de l’inducteur. Un tour d’un rotor possédant 56 pôles correspond à 28 périodes, et la vitesse de rotation peut être abaissée à 3 000/28, soit 107 tours par minute (barrage de Sarrans, sur la Truyère). La technologie de construction d’un tel rotor est alors très différente. L’inducteur est à « pôles saillants ». Il est constitué d’un volant d’acier coulé, sur lequel sont clavetés les noyaux polaires portant les bobines inductrices. La forme des épanouissements polaires est étudiée pour réaliser aussi bien que possible une répartition spatiale sinusoïdale du flux.
Le stator
L’armature du stator sert à fermer le circuit magnétique canalisant le flux inducteur. Elle est constituée par une couronne de fer feuilleté, car le flux qui la traverse tourne avec le rotor. On élimine ainsi une grande partie des pertes par courants de Foucault. Des encoches transversales contiennent les conducteurs d’induit. L’expérience de principe citée plus haut suggérait l’utilisation d’une seule encoche par pôle, encoche dans laquelle on pourrait loger plusieurs conducteurs (bobinage massé). La figure montre deux méthodes pour réunir entre eux les conducteurs d’induit, afin d’obtenir la force électromotrice la plus grande possible lorsque le nombre de pôles est supérieur à deux.
Force électromotrice de l’alternateur
Si l’on désire connaître la force électromotrice moyenne aux bornes d’un conducteur d’induit durant une demi-période, on peut écrire
le flux coupé Δφ est le flux total émané par un pôle, soit φ. Le temps correspondant à une demi-période est
si n est le nombre de tours par seconde et p le nombre de paires de pôles inducteurs. Ainsi
emoy = 2npφ.
Mais si cette f. é. m. est sinusoïdale,
Pour toute la machine, on obtient alors
N étant le nombre de conducteurs groupés en série.
Dans la pratique, on ne peut pas grouper tous les conducteurs dans une seule encoche sous chaque pôle. Ces conducteurs sont répartis de part et d’autre de l’axe de chaque pôle. Les f. é. m. dans les divers conducteurs étant légèrement décalées les unes par rapport aux autres, leur somme vectorielle est un peu plus petite que la somme arithmétique écrite ci-dessus. La forme de la tension n’étant pas non plus parfaitement sinusoïdale, l’égalité (1) n’est pas tout à fait exacte ; c’est pourquoi on écrit
E = KNnpφ.
K s’appelle coefficient de Kapp ; il est généralement un peu plus petit que 2,22.
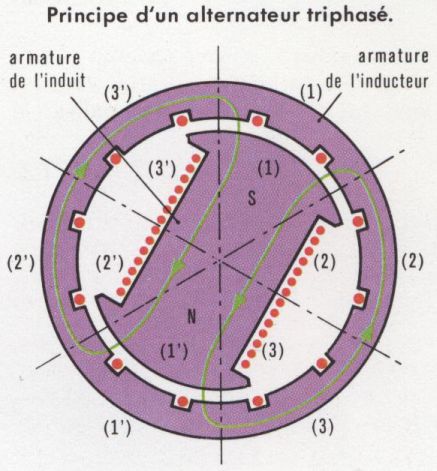
Alternateur triphasé
On ne peut installer des conducteurs d’induit tout autour du rotor, mais seulement en quelques points. Pour un alternateur bipolaire, un tiers environ de l’armature d’induit possède des encoches contenant des conducteurs actifs. L’armature d’une machine dans laquelle ces conducteurs seraient disposés tout autour de l’induit serait mieux utilisée. On construit de telles machines. Mais comme les f. é. m. produites dans les conducteurs des parties (2),(2′) et (3),(3′) ne peuvent être utilisées en série avec celles de (1),(1′), on constitue trois circuits indépendants, qui alimentent trois récepteurs distincts. Les grands réseaux de distribution sont toujours ainsi « triphasés ». Les trois circuits (1),(1′), (2),(2′), (3),(3′) peuvent avoir un point commun : c’est le neutre. Il suffit donc de quatre fils pour véhiculer un système de courants triphasés. Les trois f. é. m. obtenues sont décalées dans le temps chacune de 1/3 de période par rapport à la suivante. On démontre que, si elles alimentent des récepteurs identiques, les courants produits ont entre eux les mêmes décalages, et, comme ils ont les mêmes modules, leur somme est nulle à tout instant. Il ne circule donc aucun courant dans le fil neutre d’un système triphasé équilibré. Un alternateur triphasé ne possède souvent que trois bornes d’induit. À dimensions égales, les alternateurs triphasés ont des puissances nominales de l’ordre de 30 p. 100 supérieures à celles des alternateurs monophasés.