




cinématique (suite)
• Mouvement hélicoïdal. Un corps est animé d’un mouvement hélicoïdal si, étant donné deux positions de ce corps à deux instants arbitraires, on peut passer de l’une à l’autre par un déplacement hélicoïdal d’axe fixe et de pas constant. La translation l est liée à la rotation θ de ce mouvement par la relation l = hθ (h étant une constante). Si l’on prend comme trièdre mobile attaché au corps un trièdre (oxyz), tel que l’origine o soit sur l’axe du mouvement et que l’axe oz soit confondu avec la direction positive de cet axe, les coordonnées d’un point M de l’espace mobile dans le trièdre (OXYZ) sont :
h est dit pas réduit du mouvement hélicoïdal. H = 2πh est le pas proprement dit.
Si h > 0, le mouvement est « dextrorsum » ; si h < 0, le mouvement est « sinistrorsum » ; si h = 0, le mouvement se réduit à une rotation.
Mouvement de la Terre dans l’espace. La Terre tourne uniformément autour de la ligne des pôles ; elle est animée en même temps d’une translation variable, correspondant au mouvement de son centre O autour du Soleil. La vitesse de translation étant oblique sur la ligne des pôles PP′, le mouvement résultant est hélicoïdal. Pour déterminer l’axe instantané de rotation et de glissement, on décompose la vitesse V du centre en une vitesse U dirigée suivant PP′ et en une vitesse W perpendiculaire à PP′. La rotation ω autour de PP′, composée avec W, donne une rotation égale et parallèle autour d’un axe situé à la distance  de PP′ et rencontrant en O la perpendiculaire du plan déterminé par W et par PP′ : c’est l’axe instantané. Si l’on désigne par α l’inclinaison de V sur l’équateur, on a W = V cos α ; la vitesse V vaut sensiblement
de PP′ et rencontrant en O la perpendiculaire du plan déterminé par W et par PP′ : c’est l’axe instantané. Si l’on désigne par α l’inclinaison de V sur l’équateur, on a W = V cos α ; la vitesse V vaut sensiblement  a étant la distance moyenne du Soleil à la Terre et T la durée de l’année. D’autre part, comme la valeur
a étant la distance moyenne du Soleil à la Terre et T la durée de l’année. D’autre part, comme la valeur  représente la durée du jour sidéral, on a
représente la durée du jour sidéral, on a  comme T est à peu près égal à 366 × t et comme a vaut environ 24 000 rayons terrestres, d est très grand par rapport au rayon terrestre, et l’axe instantané passe très loin de la surface de la Terre ; par suite de cette position de l’axe, chaque point de la Terre a une vitesse légèrement variable. (Galilée avait fondé sur ce fait une explication erronée du phénomène des marées.)
comme T est à peu près égal à 366 × t et comme a vaut environ 24 000 rayons terrestres, d est très grand par rapport au rayon terrestre, et l’axe instantané passe très loin de la surface de la Terre ; par suite de cette position de l’axe, chaque point de la Terre a une vitesse légèrement variable. (Galilée avait fondé sur ce fait une explication erronée du phénomène des marées.)
• Mouvement d’un solide au contact d’un solide fixe. Soit (A) le solide fixe en contact en un seul point avec (B), le solide mobile. À un instant quelconque, un point C′ de la surface de (B) coïncide avec un point C de la surface de (A), et les deux surfaces ont même plan tangent en ce point. Au bout du temps dt, le point C′ occupe dans l’espace une autre position C″ et un nouveau point C′1 de la surface de (B) est amené en coïncidence avec un point C1 de la surface de (A). Le déplacement élémentaire de (B) peut être considéré comme résultant d’une translation C′C″ et d’une rotation autour d’un axe passant par C, rotation qui peut être remplacée par deux autres, effectuées l’une autour de la normale en C, l’autre autour d’un axe situé dans le plan tangent en C. La translation s’appelle glissement, et  est la vitesse de glissement. La rotation dφ autour de la normale est un pivotement, et
est la vitesse de glissement. La rotation dφ autour de la normale est un pivotement, et  est la vitesse de pivotement. La rotation dθ autour de l’axe tangent est un roulement, et
est la vitesse de pivotement. La rotation dθ autour de l’axe tangent est un roulement, et  est la vitesse de roulement.
est la vitesse de roulement.
Il peut arriver que les points de contact forment une aire continue ; mieux encore, dans le cas d’une vis dans son écrou, les deux surfaces sont entièrement superposées et chaque point de la surface mobile donne lieu à un glissement simple.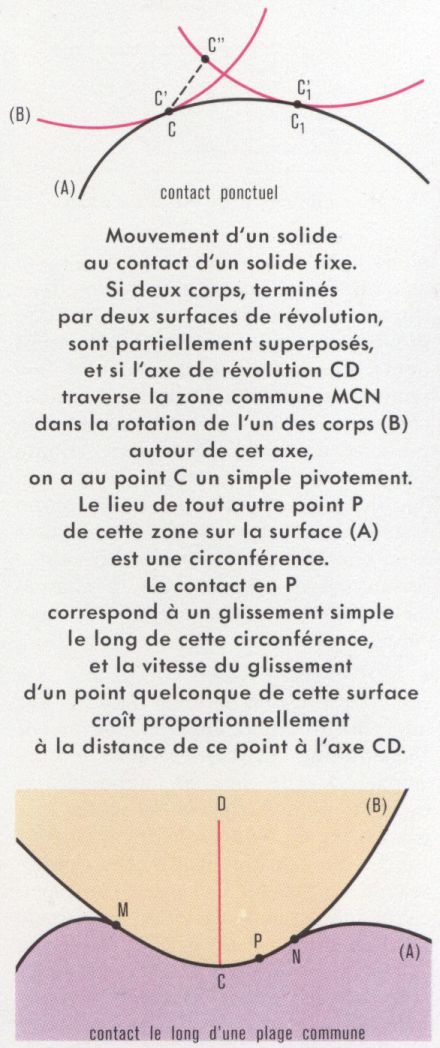
• Mouvements relatifs. La notion de mouvement n’a un sens que si l’on compare les positions successives du système mobile à celles d’un système fixe ou supposé fixe. Si le système de comparaison est réellement fixe, le mouvement est dit absolu ; si le système de comparaison est lui-même mobile, le mouvement défini par rapport à ce système est dit relatif. On ne connaît dans l’univers aucun point dont on puisse affirmer l’immobilité (même les étoiles dites « fixes »). On s’accorde cependant à considérer comme invariable l’orientation générale de la sphère céleste. Dans la plupart des questions de mécanique, on fait abstraction des déplacements du globe terrestre et l’on regarde comme absolus des mouvements purement relatifs.
Composition des vitesses. Considérons un système (S1) qui se déplace par rapport à un autre (S2), mobile lui-même par rapport à un système fixe. Le mouvement de (S1) par rapport à (S2) considéré comme fixe est le mouvement relatif ; le mouvement absolu de (S2) est appelé mouvement d’entraînement. Si l’on prend un point du système (S1) et si A est sa position à l’instant t, son mouvement relatif à partir de cet instant est défini par une trajectoire AB partant de A. Sans entraînement, cette trajectoire serait fixe et, au bout du temps Δt, le mobile viendrait occuper une position B. Mais, du fait de l’entraînement, la courbe AB se meut avec le système (S2) et, au bout de Δt, se trouve en A′B′ : le point A vient en A′, et le point B en B′. Tandis que les courbes AB et A′B′ sont égales par définition, les courbes AA′ et BB′ sont généralement différentes. La trajectoire absolue du mobile est une courbe AB′ passant par A et B′. Dans le triangle ABB′, le déplacement absolu AB′ est la résultante du déplacement relatif AB et du déplacement d’entraînement BB′. L’ordre de composition des mouvements est indifférent : la vitesse absolue est la somme géométrique de la vitesse relative et de la vitesse d’entraînement au même point A. Donc 
Cette équation est établie en ne tenant compte que des infiniment petits du premier ordre, ce qui est permis pour la recherche de la vitesse.
Composition des accélérations. Pour obtenir l’accélération, il faut plus de précautions que dans le cas des vitesses.
1o Le mouvement d’entraînement se réduit à une translation. Les déplacements BB′ et AA′ sont alors identiques, et l’égalité AB′ = AB + BB′ peut s’écrire AB′ = AB + AA′. En prenant deux fois la dérivée géométrique, ce qui est permis puisque l’égalité est rigoureuse, l’accélération absolue est la somme géométrique de l’accélération relative et de l’accélération d’entraînement.
2o Le mouvement d’entraînement est quelconque. On part de l’égalité toujours vraie  et, en étudiant les variations simultanées de ces trois vitesses dans le temps infiniment petit dt, on trouve
et, en étudiant les variations simultanées de ces trois vitesses dans le temps infiniment petit dt, on trouve
ja = jr + je + 2u.
La quantité 2u est ce que l’on nomme l’accélération complémentaire, ou accélération de Coriolis. En la désignant par jc, on a
ja = jr + je + jc.