




navigation (suite)
Radiobalise
C’est un élément d’une chaîne radioélectrique d’aide à la navigation aérienne ou maritime, pouvant parfois servir comme simple jalonnement. Sous sa forme la plus simple, une radiobalise est constituée d’un émetteur léger à poste fixe émettant généralement des micro-ondes codées pour faciliter leur repérage. Un tel système ne permet cependant pas d’effectuer un relèvement précis. Une grande amélioration a consisté à équiper la balise d’un transpondeur, analogue dans son principe au système I. F. F., mais fonctionnant à l’inverse. L’interrogateur de l’avion ou du navire reçoit l’émission du répondeur de la balise indiquant la position de cette dernière suivant un code convenu. Pour que l’émission du répondeur ne soit pas influencée par les émissions voisines (radars), sa fréquence est différente de celle de l’interrogateur. La densité du trafic aérien a conduit à réaliser des systèmes plus complexes automatisés. C’est le cas des radiogoniomètres à cadres, connus sous le nom de radiocompas, constitués de deux bobinages perpendiculaires entre eux, l’un étant excité (cadre) par une antenne directionnelle et l’autre par une antenne omnidirectionnelle. La combinaison des deux signaux dirige automatiquement le cadre dans la direction de la radiobalise, traduite à lecture directe sur un instrument de mesure gradué de 0 à 360°.
Une radiobalise d’approche dite de radioalignement (radiorange) est constituée de deux paires d’antennes émettant sur la même fréquence, mais en opposition de phase dans chaque paire. Une paire émet en morse une lettre (A) et l’autre une lettre complémentaire (N) de la première. Si la trajectoire de l’avion passe par la radiobalise, la combinaison des deux signaux donne un trait continu audible. S’il s’écarte de sa route, le pilote entend l’une ou l’autre des lettres.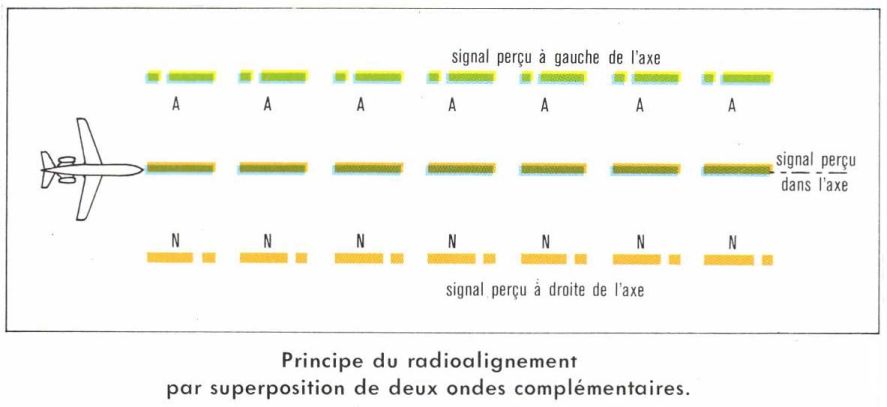
H. P.
P. Delacoudre, Principes du radar, technique de base, applications des U. H. F. (Éd. Radio, 1963).
La navigation par inertie
Cette méthode de navigation présente l’avantage de n’être tributaire d’aucune installation au sol. Son principe repose sur les lois fondamentales de la mécanique, selon laquelle tout corps subissant une accélération γ est soumis à une force égale au produit de sa masse par cette accélération. Si l’on considère une masse liée par un ressort à la structure de l’avion, elle subira donc des forces proportionnelles aux accélérations de l’avion, et celles-ci pourront être représentées par l’allongement du ressort. Ainsi, en disposant de trois masses capables de se déplacer suivant trois directions orthogonales fixes, on peut mesurer les trois composantes de l’accélération. En intégrant deux fois de suite les valeurs obtenues, ce que l’on réalise très facilement avec des moyens électroniques, on obtient successivement les composantes de la vitesse du mobile et ses coordonnées dans l’espace par rapport aux trois axes de référence choisis. Pour réaliser un système de navigation à inertie, il faut d’abord définir trois axes de référence dont les directions restent fixes quelles que soient les évolutions du mobile. Dans ce but, les trois accéléromètres sont montés sur une plate-forme stabilisée par des gyroscopes. Il faut également compenser l’action de la pesanteur terrestre, puisque celle-ci agit sur les accéléromètres quel que soit le mouvement du mobile. De plus, pour passer des coordonnées mesurées dans un espace absolu à des coordonnées par rapport à la surface terrestre, il faut tenir compte de la rotation de cette dernière sur elle-même ; cette opération est effectuée par le même calculateur qui intègre les valeurs des accélérations.
La précision de la navigation repose sur celle des accéléromètres et des gyroscopes. On réalise actuellement des accéléromètres dont l’erreur absolue est inférieure au dix-millième de l’accélération de la pesanteur et capables de détecter des accélérations comprises entre 20 g et – 20 g, la valeur la plus faible étant de 10–15 g. Quant aux gyroscopes, ils sont caractérisés par leur dérive, qui, sur les meilleurs appareils actuels, a pu être ramenée en dessous de 0,01° par heure. Il en résulte une erreur de position des centrales à inertie qui est de l’ordre de 100 m par heure de fonctionnement. Pour des déplacements de longue durée, cette erreur peut devenir prohibitive ; on est alors conduit à recaler régulièrement la centrale en faisant le point à l’aide d’un système extérieur, par exemple astronomique ou radioélectrique. On obtient ainsi une centrale assistée. La dérive des gyroscopes étant essentiellement due aux frottements, qui freinent leur rotation, on a mis au point des dispositifs particuliers qui réduisent ces frottements, tels que la suspension magnétique, qui supprime les pivots, ou la suspension au sein d’un liquide de même densité que l’organe tournant lui-même, de sorte que son poids est équilibré par la poussée d’Archimède et qu’il repose sans exercer aucun frottement sur ses pivots.
Un des avantages essentiels des systèmes de navigation à inertie réside dans leur insensibilité totale à tous les modes de brouillage, ce qui les rend particulièrement adaptés aux applications militaires. Ils équipent en particulier de nombreux avions militaires et tous les missiles de portée supérieure à quelques dizaines de kilomètres ; mais leurs performances, leurs risques de pannes réduits et leur aptitude à remplir d’autres fonctions que celles de pure navigation dans des centrales intégrées, notamment la détection des mouvements autour des axes de roulis, de tangage et de lacet, ouvrent un champ d’application dans le domaine de l’aviation de transport. En particulier, l’avion « Concorde » est équipé de deux systèmes de navigation à inertie indépendants permettant de déterminer la position de l’avion à moins de 20 milles nautiques près.
La navigation Doppler
Ce procédé de navigation est fondé sur l’utilisation de l’effet Doppler, suivant lequel la fréquence d’une onde radioélectrique est différente à l’émission et à la réception lorsque l’émetteur et le récepteur sont en mouvement relatif l’un par rapport à l’autre. La différence de fréquence est alors proportionnelle à la vitesse relative émetteur-récepteur et à la fréquence d’émission. En fait, dans cette application, l’émetteur et le récepteur sont montés sur l’avion, et la différence de fréquence est mesurée entre l’onde émise et l’onde reçue après réflexion sur le sol. De plus, pour éliminer l’influence de la pente de la trajectoire lorsque l’avion n’est pas en vol horizontal et de l’assiette longitudinale de l’avion, on émet généralement deux pinceaux d’ondes, l’un vers l’avant et l’autre vers l’arrière, et l’on prend la moyenne des deux mesures. L’émission se fait généralement sur une fréquence de la bande 12 000-15 000 MHz, sous forme d’impulsions dont la durée atteint de 25 à 50 p. 100 de la période de répétition. Les systèmes de navigation Doppler sont souvent associés à d’autres systèmes de navigation, constituant des dispositifs hybrides aux performances améliorées, notamment les systèmes Doppler-inertie et Doppler-astronomique.