




résistance des matériaux (suite)
Pour un effort normal N agissant seul, la contrainte (ou effort unitaire) sur chaque élément dS de la section S est  cet effort de compression est considéré comme positif si l’effort N est dirigé de gauche à droite à travers la section, c’est-à-dire vers les x positifs ; si l’on a, en même temps, à considérer l’effet d’un moment fléchissant, on applique la loi de Hooke généralisée et on superpose les effets.
cet effort de compression est considéré comme positif si l’effort N est dirigé de gauche à droite à travers la section, c’est-à-dire vers les x positifs ; si l’on a, en même temps, à considérer l’effet d’un moment fléchissant, on applique la loi de Hooke généralisée et on superpose les effets.
L’effet dû au moment fléchissant est
en posant M . cos q = M′, on a
où I est le moment d’inertie de la surface S par rapport à l’axe neutre, q l’angle que l’axe du moment fléchissant fait avec l’axe neutre et v la distance de la fibre dS à l’axe neutre. La contrainte n relative à la flexion composée a pour valeur
On pourrait penser que la contrainte t due à l’effort tranchant T est  c’est effectivement ce que l’on admet, par exemple, pour l’étude du cisaillement d’un rivet entre deux tôles ; mais, dans une poutre, l’effort tranchant est la dérivée du moment fléchissant par rapport à l’axe longitudinal ; le moment fléchissant ne saurait donc être nul, et, en même temps qu’un effort tranchant T, la section supporte un moment fléchissant M. En construction, un problème d’effort tranchant est toujours accompagné d’un problème de moment fléchissant, lequel est prépondérant.
c’est effectivement ce que l’on admet, par exemple, pour l’étude du cisaillement d’un rivet entre deux tôles ; mais, dans une poutre, l’effort tranchant est la dérivée du moment fléchissant par rapport à l’axe longitudinal ; le moment fléchissant ne saurait donc être nul, et, en même temps qu’un effort tranchant T, la section supporte un moment fléchissant M. En construction, un problème d’effort tranchant est toujours accompagné d’un problème de moment fléchissant, lequel est prépondérant.
Élasticité, rigidité et compressibilité des matériaux
Module d’élasticité longitudinale
Si un effort de traction (ou de compression) N sur un prisme de section S et de longueur z entraîne une modification de longueur Dz, on a
E est le module de Young, ou module d’élasticité longitudinale ;  l’allongement relatif a, et
l’allongement relatif a, et  la contrainte n (ou effort par unité de surface). On a donc
la contrainte n (ou effort par unité de surface). On a donc  ou n = EA.
ou n = EA.
Module d’élasticité transversale
Si on applique un effort T dans le plan de section normale S d’un prisme, on a
G est le module d’élasticité transversale, appelé aussi module de rigidité ou module de cisaillement, ou encore module de glissement, z la hauteur du prisme, et Δx le glissement de la base dans son plan. Comme la quantité Δx est très faible par rapport à z, on peut écrire :
α est l’angle de déformation, ou angle de distorsion ; on a donc :
Coefficient de Poisson
Si un cylindre de hauteur z et de diamètre x est soumis à un effort de traction, il subit dans la phase élastique d’une part un allongement Δz, d’autre part une contraction Δx dans le sens transversal. Le quotient σ de la contraction relative dans le sens transversal par l’allongement relatif dans le sens de l’effort de traction est appelé coefficient de Poisson :
Ce qui peut s’écrire aussi
Ce calcul demeure valable dans le cas d’une compression ; il y a alors raccourcissement dans le sens de l’effort et gonflement dans le sens transversal ; le coefficient de Poisson demeure le même ; ce coefficient est d’ailleurs lié à la compressibilité du solide. Pour les corps à élasticité normale, tels que l’acier, il est toujours en valeur absolue inférieur à  Pour les corps élasticité dite « caoutchoutique », qui se déforment par glissement des molécules sans variation des distances intermoléculaires, σ est égal à
Pour les corps élasticité dite « caoutchoutique », qui se déforment par glissement des molécules sans variation des distances intermoléculaires, σ est égal à
Module de compressibilité élastique
Si l’on soumet l’unité de volume d’un corps à un accroissement de pression ΔP, il en résulte une diminution de volume ΔV (en valeur relative) ; le module de compressibilité C portant sur un volume V est défini par
Si v est la variation de volume relative, on a
moins le corps est compressible, plus le module de compressibilité C est élevé.
Relations entre les modules E, G, C et σ
Ces relations, qui sont théoriques, sont les suivantes :
Connaissant deux modules, on peut calculer les deux autres.
Courbes intrinsèques de résistance élastique
Si l’on soumet un solide homogène et isotrope à l’action de forces extérieures (et de réactions, s’il n’est pas libre), il en résulte, par le jeu des transmissions moléculaires, certaines déformations en chaque point. Les contraintes nées de ces déformations dépendent de la nature du matériau, de son état physique, de ses dimensions et de sa forme ; si l’on considère les éléments de surface (facettes) autour d’un point, les contraintes associées à ces surfaces élémentaires ne sont pas normales à celles-ci, comme c’est le cas pour les liquides au repos ; toutefois, en chaque point, il existe trois facettes normales aux contraintes associées et normales entre elles. Les contraintes autour d’un point peuvent être représentées par un ellipsoïde, appelé ellipsoïde de Lamé, qui a pour équation :
a, b, et c étant les contraintes orthogonales, appelées contraintes principales.
Cercle de Mohr
Soient deux axes Oν et Oτ. On figure suivant Oτ la trace de la facette considérée, dont il existe une triple infinité par point. On porte les trois contraintes principales sur l’axe des ν, à partir de O :
OA = a, OB = b et OC = c,
et on construit trois cercles ayant AB, BC et AC comme diamètres. Le cercle extérieur de diamètre AC est le cercle de Mohr ; il est indépendant de la tension principale intermédiaire OB. Une contrainte  quelconque du solide a son extrémité M placée à l’intérieur du cercle de diamètre AC, mais à l’extérieur des cercles de diamètre AB et BC. La plus grande tension dans une direction donnée est représentée par le segment OP, le point P se trouvant sur la circonférence du cercle de Mohr ; l’angle a du segment CP avec l’axe Oν est l’angle que fait la normale à la facette avec la plus grande tension principale, et l’angle complémentaire β est l’angle de la normale à la facette avec la plus petite tension principale ; quant à la tension principale intermédiaire, elle est, dans ce cas, située dans le plan de la facette et fait par conséquent un angle de
quelconque du solide a son extrémité M placée à l’intérieur du cercle de diamètre AC, mais à l’extérieur des cercles de diamètre AB et BC. La plus grande tension dans une direction donnée est représentée par le segment OP, le point P se trouvant sur la circonférence du cercle de Mohr ; l’angle a du segment CP avec l’axe Oν est l’angle que fait la normale à la facette avec la plus grande tension principale, et l’angle complémentaire β est l’angle de la normale à la facette avec la plus petite tension principale ; quant à la tension principale intermédiaire, elle est, dans ce cas, située dans le plan de la facette et fait par conséquent un angle de  avec la normale à la facette.
avec la normale à la facette.
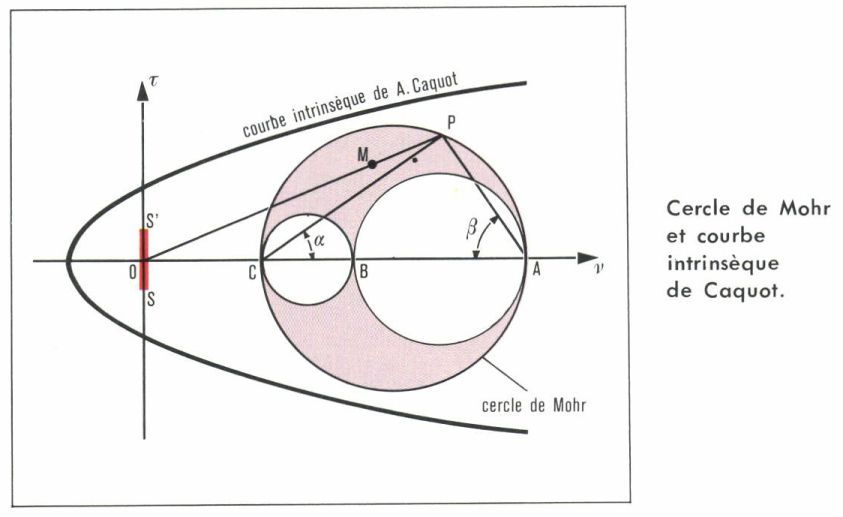
Courbe intrinsèque de Caquot
La courbe intrinsèque de résistance élastique, dite « de cisaillement », est due à Albert Caquot, qui l’a définie et en a précisé les propriétés. Elle est l’une des bases de l’étude moderne de la résistance des matériaux dans le cas le plus général. Lorsqu’on soumet un matériau isotrope et homogène à des efforts croissants, à un moment donné, la limite élastique sera franchie selon une certaine direction de surface et il se produira une rupture sous forme d’un glissement plastique le long de cette surface ; pour certains corps, ce glissement pourra être très bref et aboutir à la décohésion. Le glissement se produit quand la contrainte associée à une facette au point considéré atteint une valeur déterminée pour une obliquité donnée par rapport à cette facette. En un point où s’amorce le glissement, on a une relation τ = f (ν) entre la composante tangentielle τ et la composante normale ν de la contrainte. La représentation graphique de t en fonction de τ est désignée sous le nom de courbe intrinsèque de résistance élastique. Elle est dite « intrinsèque » parce qu’elle est caractéristique de la nature du corps et de son état physique, quel que soit le point considéré.